Удар с небес: как выглядят самые мощные беспилотники в мире
Содержание:
- Примеры массового применения дронов
- Список использованных источников¶
- Мультироторные (вертолетные) системы¶
- Постановление Правительства РФ
- РЛС на аэростате
- «Освоение новой методики»
- Эшелонированная ПВО с БПЛА ДРЛО
- Сроки подачи заявления для постановки БВС на учёт
- Высотные БПЛА
- Зарегистрировал дрон? Теперь получи разрешение на полет!
- Сроки подачи заявления для постановки БВС на учёт
- Беспилотные аппараты в России
Примеры массового применения дронов
Боевое нападение в Хмеймим
В ночь на 6-е января 2020 года БПЛА атаковали российские подразделения в Сирии, так впервые было зафиксировано первое боевое применение стаи беспилотников. От экспериментов к практике перешли суровые сирийские оппозиционеры, в качестве мишеней выбравшие российскую авиабазу Хмеймим и пункт обеспечения ВМФ в Тартусе. Группа из 13-ти штук вполне подошла для тренировки РЭБ и зенитчиков. 7 штук было сбито комплексом «Панцирь-С1», а оставшиеся 6 — посажены. При контакте с землёй 3 БПЛА взорвались. Изучение оставшихся показало, что запуск был произведён из зоны деэскалации «Идлиб». Для этого беспилотникам пришлось преодолеть более 50-ти километров.
На наиболее популярном из опубликованных фото, стоящий на столе беспилотник террористов действительно выглядит как кустарная модель
Но обращает на себя внимание несколько моментов: возможности батареи и удаленность управления (напомним о расстоянии в 50км до атаки), вес полезной нагрузки ( на фото ниже можно увидеть количество бомб на каждом крыле) и массовость использования. Сегодня любая кустарная мастерская в состоянии наладить мелкосерийный выпуск беспилотников и силами небольшого инженерного коллектива превратить их в серьёзную проблему
Поэтому столь активно обсуждаются опасения от развития данной технологии и продолжается создание оружия для уничтожения БПЛА.
Список использованных источников¶
- On This Day: Austria Drops Balloon Bombs on Venice (на английском
языке)
http://www.findingdulcinea.com/news/on-this-day/July-August-08/On-this-Day–Austria-Rains-Balloon-Bombs-on-Venice.html - The History Of Drones (Drone History Timeline From 1849 To 2019) (на
английском языке) https://www.dronethusiast.com/history-of-drones/ - 22 августа 1849 года состоялась первая в мире воздушная
бомбардировка https://aftershock.news/?q=node/328911&full - Автоматичният дявол — радиоуправляемая лодка Николы Тесла (на
болгарском языке)
https://nauka.offnews.bg/news/Tehnologii_7/Avtomatichniiat-diavol_67896.html - Радиоуправляемая лодка Теслы
https://wariwona.livejournal.com/77658.html - Nikola Tesla U.S. Patent 613,809 — Method of and Apparatus for
Controlling Mechanism of Moving Vehicle or Vehicles
https://teslauniverse.com/nikola-tesla/patents/us-patent-613809-method-and-apparatus-controlling-mechanism-moving-vehicle-or - Wright Flyer III — статья в Википедии (на английском языке)
https://en.wikipedia.org/wiki/Wright_Flyer_III - Нобелиат эпохи Возрождения
https://polymus.ru/ru/news/blogs/channels/15386-nobelevskie-laureaty/129551/ - Breguet-Richet Gyroplane No.2
http://www.aviastar.org/helicopters_eng/breguet_gyro2.php - Автожир — статья в Википедии https://ru.wikipedia.org/wiki/Автожир
- Летающая бомба Сперри (Sperry Flying Bomb) — статья в Википедии
https://ru.wikipedia.org/wiki/Sperry_Flying_Bomb -
Aircraft gyrocompass built by Sperry — статья в Википедии
- Воздушная торпеда Кеттеринга — статья в Википедии
https://ru.wikipedia.org/wiki/Воздушная_торпеда_Кеттеринга - De Havilland DH82B Queen Bee (de Havilland Aircraft Museum) (на
английском языке)
https://www.dehavillandmuseum.co.uk/aircraft/de-havilland-dh82b-queen-bee/ - De Havilland Tiger Moth — статья в Википедии
https://ru.wikipedia.org/wiki/De_Havilland_Tiger_Moth - The Mother of All Drones (история развития проекта De Havilland
Queen Bee) (на английском языке)
http://www.vintagewings.ca/VintageNews/Stories/tabid/116/articleType/ArticleView/articleId/484/The-Mother-of-All-Drones.aspx - Northrop Grumman X-47 — статья в Википедии
https://ru.wikipedia.org/wiki/Northrop_Grumman_X-47B - Новейший ударный беспилотник «Охотник» совершил первый совместный
полет с Су-57 https://tass.ru/armiya-i-opk/6937073
Мультироторные (вертолетные) системы¶
Одним из наиболее массовых БПЛА является мультикоптер. К этой группе
относятся БПЛА, имеющие больше двух несущих винтов. Реактивные моменты
уравновешиваются за счет вращения несущих винтов попарно в разные
стороны или наклона вектора тяги каждого винта в нужном направлении.
Беспилотные мультикоптеры, как правило, относятся к классам мини- и
микро-БПЛА.
Основное назначение мультикоптеров – это фото- и видеосъемка различных
объектов, поэтому они, как правило, оснащаются управляемыми подвесами
для камер. Мультикоптеры также используются в качестве устройств для
оперативного мониторинга ситуации, проведения сельскохозяйственных работ
(например, опрыскивание), для доставки грузов небольшого веса.
Рисунок 8 –“Tricopter” Рисунок 9 –
“+Copter Рисунок 10 – “XCopter”
Рисунок — “Y4Copter” Рисунок — “HexaCopter” Рисунок — “H6Copter”
Рисунок 14 — “Y6Copter” Рисунок 15 — “OctoCopter” Рисунок 16 —
“ButterflyCopter”
Трикоптер – самая простая схема построения мультикоптеров (рисунок —
17). Обычно трикоптер движется двумя винтами вперед, а третий является
хвостовым. Первые два винта имеют противоположные направления вращения и
взаимно компенсируют реактивные закручивающие моменты, у хвостового же
винта пары нет, поэтому для компенсации его реактивного момента ось
вращения этого винта немного наклоняют в сторону, противоположную
направлению закручивания. Это делают с помощью специального сервопривода
и тяги, которые используются для стабилизации или управления положением
аппарата по курсу.
Рисунок — Пример Трикоптера
Квадрокоптер – самая распространенная схема построения мультикоптеров.
Наличие четырех жестко зафиксированных роторов дает возможность
организовать довольно простую схему организации движения. Существуют две
таких схемы движения: схема «+» и схема «х». В первом случае один из
роторов является передним, противоположный ему – задним, и два ротора
являются боковыми. В схеме «х» передними являются одновременно два
ротора, два других являются задними, а смещения в боковом направлении
также реализуются одновременно парой соответствующих роторов (рисунок
18) Алгоритм управления частотами вращения винтов для схемы «+»
несколько проще и понятнее, чем для схемы «х», однако последняя
используется все же чаще из-за конструктивных преимуществ: при такой
схеме проще разместить фюзеляж, который может иметь вытянутую форму,
бортовая видеокамера имеет более свободный обзор.

Рисунок — Геоскан 401
Гексакоптеры и октокоптеры, имеющие соответственно по 6 (рисунок — 19) и
8 (рисунок — 20) моторов обладают гораздо большей грузоподъемностью по
сравнению с квадрокоптерами. Они также способны сохранять устойчивый
полет при выходе из строя одного двигателя
Такие аппараты отличаются
также гораздо меньшим уровнем вибраций, что особенно важно для
видеосъемки
Постановление Правительства РФ
Постановление Правительства Российской Федерации от 25.05.2019 №658 «Об утверждении Правил учёта беспилотных гражданских воздушных судов с максимальной взлётной массой от 0.25 килограмма до 30 килограммов, ввезенных в Российскую Федерацию или произведенных в Российской Федерации». Дата вступления в силу: 27 сентября 2019 года.
Цитата: «Пункт 2 Правил. Заявление о постановке беспилотного воздушного судна на учёт, предусмотренное пунктом 8 Правил, утверждённых настоящим постановлением, в отношении беспилотного гражданского воздушного судна с максимальной взлётной массой от 0.25 килограмма до 30 килограммов, ввезённого в Российскую Федерацию или произведенного в Российской Федерации до дня вступления в силу настоящего постановления, направляется владельцем такого воздушного судна в Федеральное агентство воздушного транспорта в срок, не превышающий 30 дней со дня вступления в силу настоящего постановления».
Подытожим: Каждый владелец беспилотника с максимальной взлётной массой от 0.25 килограмма до 30 килограммов должен зарегистрировать его путём подачи заявления в Федеральное Агентство Воздушного Транспорта (далее как ФАВТ).
РЛС на аэростате
Одним из таких способов является применение аэростатов. В США реализуется проект JLENS. В рамках данного проекта предусматривается размещение радиолокационных и оптических средств разведки на аэростатах, закреплённых в определённых точках страны, и предназначенных для обнаружения низколетящих крылатых ракет.
Высота размещения аэростатов составляет 3 — 4,5 км, масса полезной нагрузки около трёх тонн. Дальность обнаружения воздушных целей должна составлять порядка 550 км, наземных целей порядка 225 км. Помимо обнаружения, аэростат JLENS должен обеспечивать загоризонтное целеуказание для ракет земля-воздух.
Для удержания аэростата на позиции и обмена данными предполагается использовать трос, включающий в себя кабели электропитания и оптоволоконные кабели передачи данных в карбоновой оплётке.
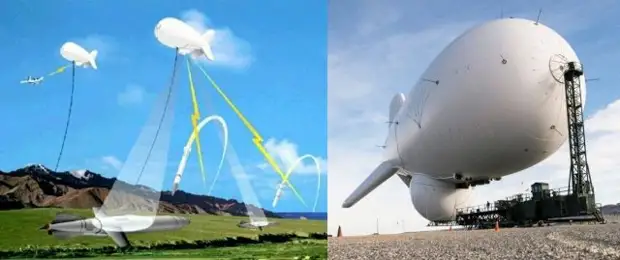 Принцип действия и сам аэростат проекта JLENS
Принцип действия и сам аэростат проекта JLENS
 Машина для плетения преформ из углеродного волокна, примерно также можно изготавливать оболочку для высокопрочных тросов
Машина для плетения преформ из углеродного волокна, примерно также можно изготавливать оболочку для высокопрочных тросов
В рамках рассматриваемой нами задачи, у данного проекта есть несколько недостатков: аэростат не очень удобен для постоянного перемещения автотранспортом, и по возможности должен быть привязан к определённой точке, что исключает возможность смены позиции мобильными ЗРК и является неприемлемым. Кроме того, огромные размеры аэростата (длина свыше 70 метров) теоретически могут препятствовать его работе в условиях сильного порывистого ветра.
С другой стороны, сама концепция является достаточно перспективной. Размещённые на аэростатах РЛС могут прикрыть от удара низколетящими СВН стационарные объекты, в первую очередь такие, как шахты межконтинентальных баллистических ракет (МБР), базы подводных лодок, носителей баллистических ракет, аэродромы стратегических бомбардировщиков, атомные электростанции и другие критичные элементы вооружённых сил и инфраструктуры страны.
Таким образом, несмотря на то, что аэростаты не являются оптимальным средством для обеспечения ЗРК возможностью поражения целей за линией горизонта, они могут сыграть важную роль в прикрытии особо важных стационарных объектов от внезапного удара низколетящими СВН противника. Их основным преимуществом является возможность квазинепрерывного нахождения в воздухе без значительных затрат топлива и электроэнергии.
В России такие аэростаты разрабатываются компанией «РосАэроСистемы». В частности, можно рассмотреть привязной аэростат большого объема «ПУМА». Аэростат Пума был разработан как носитель РЛС для круглосуточного радиолокационного наблюдение с высоты до 5 км в течение 30 дней без посадки.
Предполагаемый радиус обнаружения и сопровождения воздушных целей составит 300-350 км. Аэростат должен выдерживать ураганный ветер до 46 м/с и прямые попадания молнии. Аэростат удерживается кабелем-тросом во время подъема, спуска и стоянки на рабочей высоте, по нему же обеспечивается электроснабжение бортовых систем и полезного груза мощностью до 40 кВт, а также, отвод молний и статического электричества. Полезная нагрузка аэростата «ПУМА» составляет до 2250 кг.
 Привязной аэростат большого объема «ПУМА»
Привязной аэростат большого объема «ПУМА»
Судя по всему, вооружёнными силами РФ это направление прорабатывается: «В июле 2015 года советник первого заместителя генерального директора концерна «Радиоэлектронные технологии» (КРЭТ) Владимир Михеев рассказал РИА Новости о начале работ над проектом дирижабля для нужд противоракетной обороны страны. Он может стать полноценным элементом системы предупреждения о ракетном нападении (СПРН), которая на сегодняшний день состоит из двух эшелонов — орбитальной спутниковой группировки и наземных радиолокационных станций.»
Дело за концерном «Алмаз-Антей», необходимо чтобы аэростаты и дирижабли могли не только предупреждать об угрозе воздушного нападения, но и наводить на выявленные цели зенитные управляемые ракеты (ЗУР), оснащённые активной радиолокационной головкой самонаведения (АРГСН).
«Освоение новой методики»
Последнее время войска ЦВО осваивают новые способы борьбы с БПЛА. Так, в августе в интервью газете «Красная звезда» начальник отдела боевой подготовки 41-й общевойсковой армии ЦВО полковник Вячеслав Доцу рассказал, что для пресечения атаки дронов используются самые разные методы.
Помимо традиционных способов уничтожения беспилотников — стрельбы из зенитных комплексов, военнослужащие осваивают технику поражения из личного оружия, а также нейтрализацию с применением средств радиоэлектронной борьбы (РЭБ).
«Например, высокую эффективность в противостоянии с беспилотной авиацией показывают комплексы радиоэлектронной борьбы «Автобаза» и «Красуха» одного из соединений (41-й армии. — RT). Они способны нарушить системы управления противника, функционирование его средств связи, а значит, дезорганизовать и полёты беспилотной авиации», — сообщил Доцу.

- Тактический беспилотник
Как пояснил в комментарии RT основатель портала Military Russia Дмитрий Корнев, для противодействия дронам на современном театре военных действий (ТВД) наиболее эффективно сочетать зенитные комплексы и нетрадиционные средства поражения, включая системы РЭБ.
«Не всегда приемлемо выпускать зенитные ракеты по беспилотникам, как и полагаться исключительно на возможности РЭБ. Необходимо стремиться к тому, чтобы обнаружение дронов и отражение их атак на прикрываемую группировку войск осуществлялись разными типами вооружения. Такой подход диктует необходимость использования множества новых методик», — говорит Корнев.
Например, на полигонах 41-й общевойсковой армии развёрнуты учебные места, которые позволяют оттачивать навыки управления войсками, приёмы и способы ведения огня при обнаружении малоразмерных воздушных целей. Стрельба по макетам, имитирующим БПЛА, происходит на разных огневых рубежах.
Повышенное внимание к разработке методов противодействия беспилотникам Доцу объяснил опытом, полученным Россией в сирийской операции, где террористы применяли дроны против правительственных войск и для нападения на авиабазу Хмеймим. По словам полковника, сегодня на ТВД серьёзный ущерб могут нанести даже БПЛА, изготовленные из подручных материалов (фанеры, пластика, жести) и с установленными на них простейшими моторами и камерами
Также по теме

Эшелонированная оборона: как Россия развивает систему загоризонтной радиолокационной разведки
Создание передового эшелона системы радиолокационной разведки РФ — обоснованный и логичный ответ на фоне усиления активности…
Совершенствованием беспилотников различного класса активно занимаются и промышленно развитые государства. Причём научные изыскания в создании новых БПЛА опережают разработки средств противодействия им, констатировал Доцу.
«Поэтому мы в объединении стали создавать сводные подразделения для борьбы с БПЛА. Например, во время занятий и учений мотострелковой роты одному из отделений или взводов можно не только ставить задачу по поражению наземных целей, но и непрерывно вести наблюдение за воздушной обстановкой и при обнаружении беспилотной авиации противника незамедлительно открывать по ней огонь», — рассказал Доцу.
В рядах Южного военного округа (ЮВО) также действуют сводные формирования по уничтожению беспилотных аппаратов. В их состав входят специалисты РЭБ, войсковой разведки, снайперы, расчёты зенитных самоходных установок и противовоздушной обороны. В Минобороны отмечают, что такие группы «созданы в целях внедрения современного боевого опыта».
В частности, в июне на учениях в Чечне радиолокационные станции «Борисоглебск-2» обнаружили дроны условного противника, которые из замаскированных огневых позиций уничтожили снайперы и расчёты зенитных комплексов. Как отмечают в пресс-службе ЮВО, тренировка прошла «в рамках освоения новой методики по борьбе с беспилотной авиацией».
Эшелонированная ПВО с БПЛА ДРЛО
Применение БПЛА ДРЛО квадрокоптерного типа и БПЛА ДРЛО большой продолжительности полёта позволит создать плотное радиолокационное покрытие местности и обеспечить выдачу целеуказания ракетам с АРГСН и ИК ГСН на максимальной дальности.
Предположительно на два ЗРК малой дальности должна приходиться одна машина с БПЛА ДРЛО квадрокоптерного типа или две машины на четыре ЗРК. В состав ЗРК средней дальности должны входить две машины с БПЛА ДРЛО квадрокоптерного типа. Два БПЛА ДРЛО большой продолжительности полёта должны относиться к ЗРК большой дальности.
В угрожаемый период или в случае начала боевых действий, БПЛА большой продолжительности полёта должны осуществлять непрерывное патрулирование над позициями ЗРК. БПЛА квадрокоптерного типа, из состава ЗРК малой и средней дальности, должны находиться на машинах носителях в готовности к немедленному старту. В случае обнаружения воздушной угрозы запуск БПЛА квадрокоптерного типа должен осуществляться в течении нескольких минут.
Стоимость самих БПЛА и времени их полёта традиционно существенно ниже стоимости пилотируемых самолётов и вертолётов, что делает эту задачу экономически привлекательной. Технически предлагаемая концепция также не содержит непреодолимых проблем.
Для стационарных объектов высокой важности могут применяться аэростаты ДРЛО. В случае обеспечения ПВО объектов, оборудованных аэростатами ДРЛО, БПЛА большой продолжительности полёта не требуются и могут быть исключены из состава ЗРК большой дальности или могут находиться на аэродроме в готовности к вылету как резервное средство разведки и целеуказания
Сроки подачи заявления для постановки БВС на учёт
Цитата: «Пункт 12 Правил. Заявление о постановке беспилотного воздушного судна на учёт представляется в Федеральное агентство воздушного транспорта в следующие сроки:
- в случае приобретения беспилотного воздушного судна на территории Российской Федерации — в течение 10 рабочих дней со дня приобретения;
- в случае ввоза беспилотного воздушного судна в Российскую Федерацию — в течение 10 рабочих дней со дня ввоза;
- в случае самостоятельного изготовления беспилотного воздушного судна — до начала его использования для выполнения полётов в воздушном пространстве над территорией Российской Федерации, а также за её пределами, где ответственность за организацию воздушного движения возложена на Российскую Федерацию».
Высотные БПЛА
Для ЗРК большой дальности БПЛА вертикального взлёта и посадки уже не будет эффективным и достаточным средством разведки, поскольку высота размещения РЛС, для достижения дальности обзора порядка 400 км, должна превышать 10 000 метров.
Предположительно в качестве летающей РЛС для ЗРК большого радиуса действия могут быть использованы БПЛА большой продолжительности полёта, самолётного типа, средней или большой размерности.
Одним из кандидатов на роль перспективного беспилотника-ДРЛО может стать БПЛА Альтаир взлётной массой 5 тонн и полезной нагрузкой 1-2 тонны. Данный БПЛА создаётся в рамках НИР «Альтиус-М» в ОКБ «Сокол» (г.Казань) совместно с компанией «Транзас». Продолжительность его полёта должна составлять до 48 часов, дальность полёта 10 000 км. В 2018 году программа БПЛА Альтаир была передана АО «Уральский завод гражданской авиации» (УЗГА). Лётные испытания БПЛА Альтаир должны начаться в 2019 году.
 Прототип БПЛА Альтаир
Прототип БПЛА Альтаир
Аппараты подобного типа разрабатываются и в других странах. В частности, китайская компания CETC разрабатывает БПЛА JY-300. Аппарат средней размерности должен стать носителем конформных антенн и служить беспилотным средством ДРЛО.
По предварительным данным БПЛА JY-300 имеет взлетную массу около 1300 кг и может нести 400 кг полезной нагрузки. Он способен выполнять полеты продолжительностью до 12 часов, на высотах до 7,6 км. Встроенные в конструкцию данного беспилотника РЛС должны позволить выполнять обнаружение воздушных и морских целей на больших расстояниях.
 Прототип БПЛА ДРЛО JY-300 китайской компания CETC
Прототип БПЛА ДРЛО JY-300 китайской компания CETC
Российские БПЛА средней и большой размерности преследует множество проблем, включая отсутствие компактных, мощных и экономичных отечественных двигателей, отсутствие современной авионики. Одной из важнейших проблем является отсутствие высокоскоростных каналов спутниковой передачи данных с глобальной досягаемостью, позволяющих обеспечить управление БПЛА и получение от него разведывательной информации на большом удалении от пункта базирования.
Применение БПЛА ДРЛО с большой продолжительностью полёта не требует обязательного наличия таких каналов. В общих чертах работа связки ЗРК большой дальности – БПЛА большой продолжительности полёта может выглядеть так:
БПЛА ДРЛО большой продолжительности полёта осуществляет взлёт с аэродрома и выходит в зону патрулирования над позициями эшелонированной ПВО. Вся информация с него поступает операторам ЗРК большой дальности, и далее, через пункт боевого управления операторам других ЗРК, входящих в объединённую эшелонированную ПВО.
Полёт БПЛА должен осуществляться по большей части в автоматическом режиме по заданной траектории. К одному ЗРК большой дальности должны относиться два БПЛА ДРЛО. В этом случае, они могут осуществлять посменно боевое дежурство над позициями ЗРК продолжительностью по 36-48 часов, в зависимости от удалённости аэродрома базирования.
Требования к БПЛА ДРЛО большой продолжительности полёта такие же, как и к БПЛА для ЗРК малой и средней дальности – высокий эксплуатационный ресурс и низкая стоимость лётного часа.
Может возникнуть вопрос: в заглавии статьи говорится о работе ЗРК по низколетящим целям без привлечения авиации ВКС, а БПЛА большой продолжительности полёта явно относятся к авиации. Здесь вопрос скорее в ведомственной принадлежности. В США, по соглашению Джонсона-МакКонелла между армией и ВВС, вертолёты не относятся к ВВС и подчиняются напрямую армии США, действуют в её интересах. Так и нашем случае, то, что БПЛА относится к конкретному ЗРК не позволит использовать его ВКС для других целей.
Зарегистрировал дрон? Теперь получи разрешение на полет!
Для беспилотных самолетов, коптеров и авиамоделей с массой менее 30 кг не нужно проходить регистрацию для получения разрешения и предоставлять план полета в случае, если:
-
полет осуществляется в светлое время суток при условии хорошей погоды и при условии прямой видимости дрона;
-
относительная (ATL) максимальная высота полета БПЛА от водной или земной поверхности составляет не больше 150 метров;
-
маршрут устройства пролегает вне аэродромных диспетчерских зон, запретных или специальных территорий, зон проведения мероприятий с массовым скоплением людей, охранных территорий и находится от них на удалении не менее 5 км.
В остальных случаях, разрешение на полет БВС получают путем обращения в соответствующие органы местного управления и органы воздушного движения– ЕС ОрВД. Совместно с запросом на разрешение, заявителю необходимо предоставить план для регистрации полета воздушного судна. Для владельцев, поставивших БВС на учет реализована возможность регистрации на порталах
и
для планирования маршрутов, с автоматическим формированием плана полета и отправкой его в органы воздушного движения.Также, пользователи могут подать представление и флайтплан, отправив запрос на электронную почту или факс ведомства. Более подробная информация об этой процедуре в статье Получение разрешений на полеты.
Актуальная полетная информация на сайте new.ivprf.ru
Сроки подачи заявления для постановки БВС на учёт
Цитата: «Пункт 12 Правил. Заявление о постановке беспилотного воздушного судна на учёт представляется в Федеральное агентство воздушного транспорта в следующие сроки:
- в случае приобретения беспилотного воздушного судна на территории Российской Федерации — в течение 10 рабочих дней со дня приобретения;
- в случае ввоза беспилотного воздушного судна в Российскую Федерацию — в течение 10 рабочих дней со дня ввоза;
- в случае самостоятельного изготовления беспилотного воздушного судна — до начала его использования для выполнения полётов в воздушном пространстве над территорией Российской Федерации, а также за её пределами, где ответственность за организацию воздушного движения возложена на Российскую Федерацию».
Беспилотные аппараты в России
В 1960–80 в СССР были созданы Ла-17Р (разработка началась в 1959), Ту-123 «Ястреб» (сверхзвуковой дальний беспилотный разведчик), Ту-141 «Стриж» (1979–89), Ту-300 «Коршун». Разработка и испытания разведывательного БПЛА Ла-17Р завершились в 1963. Они показали, что машина, летая на высоте до 900 м, способна осуществлять фоторазведку объектов, находящихся на удалении 50–60 км от стартовой позиции, а с высоты 7000 м – объектов на удалении до 200 км. Скорость полёта составляла 680–885 км/ч. В 1960 началось разработка Ту-123 – цельнометаллического моноплана нормальной аэродинамической схемы с треугольным крылом. Хвостовое оперение состояло из трёх цельноповоротных рулевых поверхностей, ориентированных под углом 120° друг к другу и установленных на специальных наплывах, в которых размещались электрические рулевые машинки с водяным охлаждением. Фюзеляж состоял из шести секций. В носовой части размещалась разведывательная аппаратура массой 2800 кг. Носовая часть выполнялась спасаемой (на парашюте). Она соединялась с хвостовой частью четырьмя пневмозамками. Перед пуском БПЛА в автопилот вводилась заранее рассчитанная программа полёта. После старта разведчик летел в автоматическом режиме. На завершающем этапе полёта самолёт управлялся, как правило, в ручном режиме. Это позволяло точнее вывести аппарат в район посадки. Над выбранным местом подавались радиокоманды на выключение маршевого двигателя и выпуск тормозного парашюта. В 1964 система ДБР-1 «Ястреб» принята на вооружение ВВС Советской Армии (размах крыла – 8,41 м, длина – 27,84 м, высота – 4,78 м, максимальная взлётная масса – 35 610 кг, крейсерская скорость – 2700 км/ч, потолок – 22 800 м, максимальный радиус действия – 1400 км). Серийное производство БПЛА Ту-123 и других элементов системы продолжалось в Воронеже до 1972, всего было построено 52 экземпляра беспилотного самолёта-разведчика. В начале 1990-х построен оперативно-тактический многоцелевой дистанционнопилотируемый аппарат Ту-300, который проектировался уже не просто как разведывательный БПЛА, но и как носитель ракетного или бомбового вооружения. В ОКБ Яковлева разработан тактический БПЛА «Пчела-1Т» (первый полёт в 1986). Одна из последних разработок – тактический разведывательный комплекс «Типчак» (прошёл государственные испытания, но не принят на вооружение).
Ныне к основным задачам БПЛА относятся разведка, наблюдение и сбор информации, а также нанесение высокоточных ударов. Однако набор задач, которые могут решать военные БПЛА, гораздо шире, не говоря уже о гражданских применениях. Несмотря на достижения советского периода, сейчас развитие БПЛА в России значительно отстаёт от аналогичных программ стран НАТО. Практически не развивались специфичные технологии, применяемые при создании БПЛА (особенно в области систем управления). В то же время потребности в развитии беспилотной авиации стали ощущаться всё острее. В 2007 ОКБ «МиГ» и «Климов» представили ударный беспилотник «Скат», создаваемый с применением технологии малозаметности. В 2011 сообщалось, что на базе ОАО «Горизонт» (Ростов-на-Дону) совместно с австрийской фирмой Schiebel налажено производство беспилотных вертолётов Schiebel Camcopter S-100 (российское наименование комплекса – БАК «Горизонт Эйр S-100»). Поступление в Вооружённые силы РФ первых разведкомплексов с БПЛА малой дальности российского производства «Орлан-10» началось в 2013. В 2014 сформирован первый отряд БПЛА «Форпост» на Тихоокеанском флоте. В 2012 завершились войсковые испытания малогабаритного разведкомплекса «Искатель» с беспилотными летательными аппаратами Т-4 российского производства. Комплекс «Искатель» состоит из базовой станции, которая размещается в рюкзаке, планшетного компьютера (на него транслируется изображение с камер беспилотников, он же служит консолью управления беспилотным летательным аппаратом) и двух аппаратов Т-4 массой 1,3 кг каждый. Беспилотники запускаются «с руки», продолжительность полёта аппарата – 40 мин. Оптимальную картинку местности аппарат передаёт с высоты 200 м, но способен подняться на высоту до 4 тыс. м, то есть работать в условиях горной местности. Беспилотник оснащён электрическим двигателем, размах крыла аппарата – 0,6 м. В 2015 в России был разработан для БПЛА свой собственный поршневой двигатель АПД-500, который может обеспечить полёт беспилотной машины на высоте более 6000 м, мощностью около 37 кВт, а его масса составляет 30 кг. Серийное производство двигателя планируется к концу 2017 – началу 2018.