Тахометр на arduino: схема и программа
Содержание:
- Проверка оборотов двигателя
- Аналоговые/пропорциональные датчики для повышения стабильности и точности
- ВНИМАНИЕ!
- Принцип работы тахометра достаточно простой
- Что такое эффект Холла
- Компоненты
- Работа схемы
- Как подключить модуль с датчиком Холла к плате «Ардуино»
- Скетч тахометра на arduino
- Настройка карбюратора автомобиля
- Генератор сигналов на микросхеме таймера 555
- Используем микроконтроллер
Проверка оборотов двигателя
В процессе эксплуатации автомобиля нужно знать, как проверить тахометр в домашних условиях. Большинство машин оборудованы спидометром, манометром, датчиком температуры охлаждающей жидкости и тахометром. Они установлены по-разному в зависимости от марки и модели авто. Последовательность действий:
Проверить тахометр перед поездкой, внимательно осмотреть датчики. Циферблат обычно показывает одно- или двузначные числа, которые ограничены красной полосой разрешённого предела работы.
Запустить автомобиль. Нажать педаль тормоза правой ногой и включить ключ зажигания
Показания тахометра должны расти, прежде чем остановиться на количестве оборотов двигателя на холостом ходу.
Нажать педаль газа и обратить внимание на поведение тахометра.
Контролировать показания во время движения на каждой передаче и при переключении на следующую.
Избегать чрезмерного перегруза двигателя. Красная линия на шкале представляет наибольшее количество оборотов, которые двигатель способен безопасно выдерживать.
Если нужно дополнительно измерить RPM автомобиля, чтобы помочь диагностировать проблему, используют ручной тахометр, измеряющий число оборотов во время работы.
Аналоговые/пропорциональные датчики для повышения стабильности и точности
Аналоговые измерительные приложения позволяют конечному пользователю мгновенно получать обратную связь о положении магнита. Аналоговый датчик Холла обладает высокоточным выходным сигналом с высоким разрешением.
Ранее аналоговые датчики Холла измеряли у магнитов плотность потока и в значительной степени зависели от внешней температуры. Так как в последние годы аналоговые технологии эффекта Холла развивались, теперь, вместо традиционной амплитуды поля, микросхема с датчиком Холла теперь измеряет угол поля, делая его намного менее чувствительным к изменениям температуры. Это улучшение позволяет датчику обеспечивать более стабильный аналоговый выходной сигнал в широком диапазоне температур.
Рассмотрим два типа датчиков Холла, которые могут быть выбраны для аналоговых измерительных схем:
Поворотный датчик Холла: преимущества и применение
Этот полупроводниковый датчик изменяет выходное напряжение при изменении магнитного поля. Он сочетает в себе измерительный элемента на основе эффекта Холла и электрическую схему, обеспечивающую аналоговый выходной сигнал, который соответствует изменению вращающегося магнитного поля без использования каких-либо движущихся частей. Этот датчик предлагает два варианта выходного сигнала: аналоговый или широтно-импульсно-модулированный (ШИМ). Устройство программируется таким образом, чтобы инженер мог связать определенное выходное напряжение или ШИМ сигнал с точной степенью поворота. При повороте до 360° доступны несколько точек программирования. Каждая программируемая точка представляет собой напряжение или ШИМ сигнал, который соответствует заданному углу магнитного поля. Это приводит к получению выходного сигнала, пропорционального углу поворота.
В отличие от механического и резистивно-плёночного поворотных устройств поворотный датчик Холла не испытывает механического износа или изменения значений сопротивления. Кроме того, он очень стабилен при нормальных рабочих температурах вплоть до +105°C. Результаты измерения угла поворота в диапазоне 0°–360° точно калибруются в соответствующем диапазоне выходного постоянного напряжения 0,5В–4,5В или коэффициента заполнения ШИМ сигнала 10–90%.
Поворотные датчики Холла становятся очень популярными для замены механических резистивно-пленочных потенциометров. Они используются в автомобильных и внедорожных приложениях, таких как определение положения клапана EGR в двигателях. Эти датчики также могут использоваться для определения положения поворотных ручек в приборах и бытовой технике.
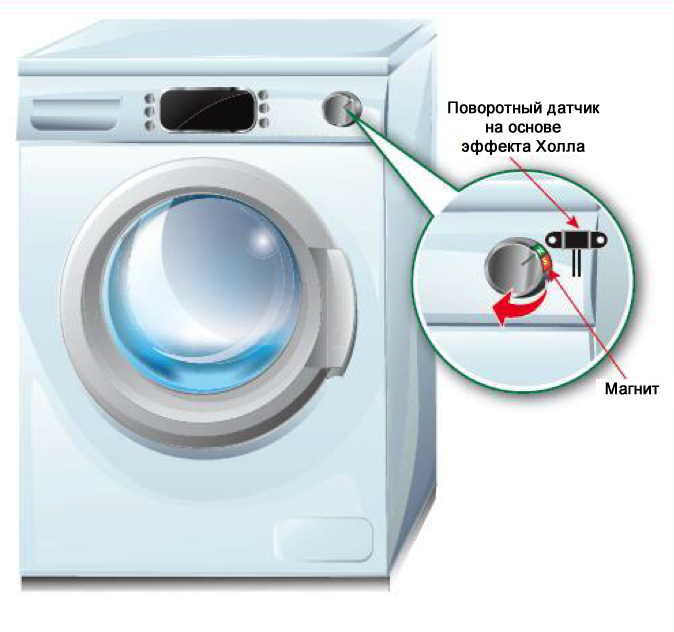 Рисунок 3 – Поворотный датчик Холла, используемый в поворотной ручке стиральной машины
Рисунок 3 – Поворотный датчик Холла, используемый в поворотной ручке стиральной машины
Линейный датчик Холла: преимущества и применение
Линейные датчики Холла похожи на поворотные датчики Холла, за исключением того, что они измеряют не угловое, а линейное движение магнитного поля. Датчик Холла программируется для выдачи заданного напряжения, пропорционального заданному расстоянию. Типы выходного сигнала у него такие же, как и у поворотного датчика Холла. Датчик измеряет линейное перемещение и относительный угол потока магнитного привода на расстоянии до 30 мм на каждую микросхему с датчиком Холла. Это дает в результате выходной сигнал, точно пропорциональный перемещению датчика.
Перед программированием выходных напряжений или значений ШИМ-сигнала, соответствующих относительному значению магнитного поля от магнита на приводе, датчик и привод могут быть помещены на место окончательного монтажа в устройстве, чтобы в процессе программирования учесть все магнитные воздействия от близлежащего окружения. Это позволит инженеру отрегулировать выходной сигнал датчика, поскольку в процессе программирования будут учтены любые шунтирующие, механические воздействия и воздействия посторонних магнитных полей.
Линейные датчики Холла часто используются в качестве датчиков контроля уровня жидкости. В этом применении датчик определяет положение движущегося поплавка с прикрепленным магнитом. Линейные датчики также полезны в более сложных конструкциях, таких как автомобильная коробка передач.
ВНИМАНИЕ!
Если вы не знаете, куда подключить Arduino, где взять программу для прошивки, как установить драйвера, как всё настроить и как устанавливать библиотеки – читайте статейку “Первые шаги с Arduino”, ссылка справа от этого текста. Там же разобраны типичные ошибки, описаны варианты питания и есть краткий FAQ.
ПЕРВЫЕ ШАГИ С ARDUINO
-
3 цифровой пин используется как источник питания (+5В) для датчика Холла. Для этого в setup() прописано подать сигнал высокого уровня на 3 пин.
-
2 пин принимает прерывания. Для нано и уно это 2 и 3 пины, и при объявлении прерывания она называются соответственно 0 и 1 (0 это второй, 1 это третий)
-
3 цифровой пин используется как источник питания (+5В) для датчика Холла. Для этого в setup() прописано подать сигнал высокого уровня на 3 пин.
-
2 пин принимает прерывания. Для нано и уно это 2 и 3 пины, и при объявлении прерывания она называются соответственно 0 и 1 (0 это второй, 1 это третий)
-
Библиотека разархивируется в папку
C:Program Files (x86)Arduinolibraries (Windows x64)C:Program FilesArduinolibraries (Wondows x86)
-
Поковырявшись в библиотеке, можно найти управление яркостью дисплея
-
3 цифровой пин используется как источник питания (+5В) для датчика Холла. Для этого в setup() прописано подать сигнал высокого уровня на 3 пин.
-
2 пин принимает прерывания. Для нано и уно это 2 и 3 пины, и при объявлении прерывания она называются соответственно 0 и 1 (0 это второй, 1 это третий)
-
Функция map – преобразует диапазон частот вращения (в примере от 0 до 1500) в диапазон угла поворота сервомашинки (в примере от 0 до 180 – максимально возможный для сервы)
-
3 цифровой пин используется как источник питания (+5В) для датчика Холла. Для этого в setup() прописано подать сигнал высокого уровня на 3 пин.
-
2 пин принимает прерывания. Для нано и уно это 2 и 3 пины, и при объявлении прерывания она называются соответственно 0 и 1 (0 это второй, 1 это третий)
Алекс2016-06-24T23:31:17+03:00
Принцип работы тахометра достаточно простой
Есть несколько разновидностей конструкции:
Электрическая схема импульсная
На вал, частота которого измеряется, устанавливается метка, излучающая любое поле. Чаще всего это маленький магнит.
Рядом с валом размещается считывающее устройство – датчик. На нем формируются импульсы, соответствующие скорости вращения вала.
Электронная схема принимает сигналы, и выводит их на устройство отображения. Вместо пары магнит-датчик иногда применяется фото и светодиод.
Тогда на вал устанавливается диск с отверстием, и считывание происходит по вспышкам света.
Преимущество схемы – идеальная точность. Фактически, это цифровое устройство, работающее без погрешностей. Кроме того, такая схема не отбирает мощность у двигателя.
Недостаток – требуется электропитание. Это исключает применение прибора в чисто механических агрегатах.
Электрическая схема генераторного типа
Вал механизма соединен с компактным генератором. В зависимости от скорости вращения, меняется величина вырабатываемого напряжения.
Показания снимаются прибором, работающим по принципу вольтметра. Иное название – тахометр постоянного тока. Главное преимущество – нет необходимости в источнике питания.
Индукционный тахометр
Это также генераторная схема, только в данной конструкции применяется машина асинхронного типа. На катушки статора подается питание, и при вращении ротора происходит возбуждение и линейное увеличение напряжения. У таких приборов высокая погрешность, и они не являются энергонезависимыми. Зато снятие показаний (в отличие от тахометра постоянного тока) происходит уже на малых оборотах.
Механический тахометр
Система автономная, для работы не требуется ни питания, ни управляющих схем. На валу (5) жестко закреплен постоянный магнит (4). При вращении магнита возникает вихревое поле, которое увлекает за собой чашу (3) из магнитного материала.
Вращению чаши препятствует спиральная пружина (2). Чем выше скорость вращения, тем сильнее отклоняется вал со стрелкой.
Главное достоинство прибора – простота конструкции и отсутствие необходимости в электропитании. Недостатков два: высокая погрешность и сдвинутый нижний предел измерений. При малых оборотах стрелка не отклоняется.
Мы рассмотрим самое востребованное применение тахометров – автомобиль.
Любой механизм вращения (в нашем случае – коленчатый вал автомобиля) имеет предел нагрузки. То есть, силовая структура и подшипники могут выдержать определенную скорость.
Кроме того, остальные механизмы мотора также рассчитаны на предельно допустимую частоту оборотов.
Поэтому установка прибора контроля обязательна для любого современного ДВС. Исключение составляют лишь маломощные моторы для мотоциклов и мопедов.
Для контроля за оборотами коленвала нужен тахометр. В большинстве автомобилей (особенно с механическими КПП), показания прибора дают водителю возможность правильно выбирать момент перехода на следующую ступень.
Изготовление тахометра своими руками на базе Arduino, подробное видео.
В машинах с автоматической трансмиссией, схема подключения тахометра подает сигнал в модуль управления. Электроника не даст мотору выйти за разрешенные пределы.
Если ваш прибор перестал подавать признаки жизни, необходима диагностика. Как проверить тахометр в домашних условиях?
В автомобилях, оснащенных интерфейсом OBD II, проверка осуществляется с помощью сканера. Также электронный тахометр можно проверить с помощью любого генератора импульсов. В качестве эталона используем осциллограф, частотомер, или заведомо исправный прибор.
Механический тахометр проверяется с помощью дрели или шуруповерта. Хорошо, если есть регулятор оборотов. Хвостовик тросика крепится в патроне, корпус прибора жестко закрепляется.
Ремонт тахометра не такая сложная задача, если это не модуль электросхемы. После локализации неисправности, меняется неисправный компонент.
Проводка, контакты датчика, сам датчик, оторванный магнитик на коленвале. Как правило, причина поломки именно в этих деталях.
С механикой еще проще. Надо просто заменить изношенный узел на новый, либо приобретенный на авторынке.
Автомобили с механическими тахометрами, как правило, относятся к сильно подержанным, так что найти б/у запчасть не сложно. Подключение тахометра после ремонта калибровки не требует.
Что такое эффект Холла
Эффект Холла можно рассмотреть с точки зрения движения зарядов (заряженных частиц) в магнитном поле. Чтобы понять на практике как это происходит подсоединим батарею к проводнику как показано на рисунке ниже. Электрический ток (i) в этом случае начнет протекать по проводнику от положительного контакта батареи к ее отрицательному контакту.
Но поток электронов (e-) в этом случае будет направлен в противоположном направлении, то есть от отрицательного контакта батареи к ее положительному контакту. В этот момент времени если мы измерим напряжение (разность потенциалов) на концах проводника (поперек его) как показано на рисунке ниже, то оно будет равно нулю.
Теперь создадим магнитное поле над проводником как показано на следующем рисунке.
И если в этот момент времени мы измерим напряжение на концах проводника (поперечных прохождению тока), то оно будет отлично от нуля. Это напряжение и называется «напряжением Холла», а само это явление называется «эффектом Холла».
Компоненты
Для сборки понадобятся:
- плата Arduino Uno. Ключевой управляющий и логический элемент, принимающий сообщения о прерывании светового луча и делающий вывод о нахождении на участке «приемник-передатчик» вращающегося объекта. Импульсные команды и встроенный таймер позволят системе вычислить обороты вентилятора;
- макетная плата;
- ЖК-экран 16×2. Служит для понятного отображения счетчика RPM;
- резистор подстроечный на 5 кОм. С его помощью регулируется контрастность упомянутого выше дисплея. Резистор позволяет менять напряжение от 0 до +5 вольт и настраивать удобный контраст экрана;
- SIP-разъемы;
- перемычки;
- транзисторы — 2 штуки (2N3904 и 2N3906). Они преобразуют уровень сигнала с фототранзистора до «понятного» плате Ардуино уровня 0 или 5 В;
- фототранзистор — 1 шт. При падении на этот модуль сильного света транзистор перекрывается. Пока ИК-диод горит, фотодатчик остается «открытым», но при перекрытии он, разумеется, перейдет в закрытое состояние;
- ИК-светодиод — 1 шт. Основная часть передающего модуля;
- резисторы на 10 Ом, 100 и 15–16 кОм — по одной штуке;
- небольшой пятивольтовый ПК-вентилятор.
Для связи будет служить подсоединенный через низкоомный резистор ИК-светодиод: так луч выйдет ярче. Сигнал с диода пойдет на фототранзистор, «закрывающийся» при отключении светового потока. В качестве подконтрольного объекта используется компьютерный вентилятор, частоту вращения которого и станет считать прибор. Он будет висеть между передатчиком и приемником.
Подключенный по транзисторной схеме ИК-приемник создает прерывания и отправляет их на контроллер Ардуино. Плата обрабатывает их через процедуры из программной библиотеки для работы с дисплеями Arduino LCD и выводит данные на экран.
Принципиальная схема будущего устройства:
Особенности схемы тахометра
Приведенная раскладка имеет некоторые нюансы:
- на интерфейсе ЖК-дисплея к экрану подключены 4 контакта передачи данных и 2 управляющих;
- сигнал перекрытия инфракрасного луча поступает на цифровой вход 2 контроллера Arduino. По этому прерыванию плата зафиксирует импульс и увеличит внутренний счетчик тахометра.
Работа схемы
Схема тахометра на основе платы Arduino представлена на следующем рисунке.
Схема содержит плату Arduino Pro Mini, модуль инфракрасного датчика и ЖК дисплей. Плата Arduino управляет всем процессом функционирования устройства: считывание импульса с выхода модуля инфракрасного датчика, вычисление частоты вращения (в оборотах в минуту) и передача значения этой частоты на ЖК дисплей. Инфракрасный датчик используется для обнаружения объекта. Мы можем регулировать чувствительность данного датчика с помощью встроенного в него потенциометра. Модуль инфракрасного датчика состоит из инфракрасного передатчика и фотодиода, который обнаруживает инфракрасные лучи. Инфракрасный передатчик излучает инфракрасные лучи, когда эти лучи падают на поверхность, они отражаются от нее и улавливаются фотодиодом (более подробно об этих процессах можно прочитать в статье про робота, движущегося вдоль линии). Выход фотодиода подключен к компаратору, который сравнивает значение с выхода фотодиода с опорным напряжением и результат сравнения выдает на плату Arduino.
Выход модуля инфракрасного датчика напрямую подключен ко контакту 18 (A4) Arduino. Vcc и GND подсоединены к контактам Vcc и GND arduino. ЖК дсиплей подключен к плате Arduino в 4-битном режиме. Его управляющие контакты RS, RW и En напрямую подсоединены к контактам 2, GND и 3 Arduino. Контакты данных D4-D7 подключены к контактам 4, 5, 6 и 7 Arduino. В схеме также присутствует кнопка, которую необходимо нажать для подсчета числа оборотов. Наш тахометр на основе платы Arduino подсчитывает число оборотов в течение 5 секунд а потом по вышеприведенной формуле осуществляет пересчет этого значения в число оборотов в минуту. Кнопка подключена к контакту 10 Arduino.
Как подключить модуль с датчиком Холла к плате «Ардуино»
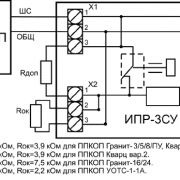
Устройство, базирующееся на эффекте Холла, включает в себя такие элементы:
- резистор подстройки;
- компаратор с 2 каналами;
- несколько резисторов для согласования;
- 2 светодиодных элемента;
- сенсор.
Резистор подстройки предназначен для того, чтобы настраивать чувствительность сенсора. 1-й светодиодный элемент показывает, есть ли напряжение электропитания на модуле. 2-й светодиод подает сигнал, когда магнитное поле превышает определенный порог срабатывания.
Устройство содержит 4 вывода. Подключение датчика Холла к Arduino выполняется так:
- вывод G подключается к разъему GND на плате «Ардуино», служит для заземления;
- + подсоединяется к 5V, предназначен для электропитания от +2 до +10 В;
- AO подсоединяется к A0, представляет собой аналоговый вывод, служит для измерения напряжения магнитного поля;
- DO подключается к 12, является цифровым выводом, который подает сигнал, когда магнитное поле превышает установленный уровень напряженности.
Таким же образом можно подключить четыре и более датчиков Холла к Arduino, но постарайтесь не забыть расширить программу для всех устройств, это будет делаться обычным копированием и заменой номеров пинов.
Скетч тахометра на arduino
Ниже приведен скетч с подробными комментариями, а также его можно скачать себе на компьютер: скачать.
// библиотеки для работы с LCD дисплеем по I2C
#include <Wire.h>
#include <LiquidCrystal_I2C.h>
// инициализация дисплея.
// GND - земля
// VVC - 5+ вольт
// SDA - пин A4
// SCL - пин A5
// 16 столбцов и 2 строки
LiquidCrystal_I2C lcd(0x27,16,2);
const int pinPhoto = A0; // порт для считывания данных с фоторизистора
int light = 0; // переменная для хранения данных с фоторизистора
int numTurn = 0; // номер итерации проверки оборотов
int valArray; // массив для хранения данных с фоторезистора, нужные для начальной настройки
int maxLight = 1024; // порог, при котором будем считать, что светодиод закрыт
int sum = -1; // сумма количеств оборотов
int count_zamer = 20; // количество итераций, после которых будет высчитано среднее значение скорости
unsigned long lastMillis = 0; // переменная для хранения времени предыдущего перекрытия светодиода
bool work = true; // флаг, который поднимается после открытия светодиода
void setup() {
Serial.begin(9600);
pinMode( pinPhoto, INPUT );
// ждем пока светодиод прогреется
delay(1000);
// каждые 10 милисек считаем значение с фоторезистора, 100 раз
for(int i = 0; i< 100; i++){
valArray = analogRead( pinPhoto );
delay(10);
}
// выбераем минимальное значение с фоторезистора
for(int i = 0; i< 100; i++){
if(maxLight > valArray) maxLight = valArray;
}
// немного снизим порог
maxLight -= 10;
Serial.println( maxLight );
delay(500);
Serial.println( "START!" );
lastMillis = millis();
// запускаем дисплей
lcd.init();
// включаем подсветку
lcd.backlight();
// стираем все лишнее
lcd.clear();
// выводим текст
lcd.setCursor(0, 0); lcd.print("S");
lcd.setCursor(1, 0); lcd.print("T");
lcd.setCursor(2, 0); lcd.print("A");
lcd.setCursor(3, 0); lcd.print("R");
lcd.setCursor(4, 0); lcd.print("T");
lcd.setCursor(5, 0); lcd.print("!");
}
void loop() {
// считаем показания с фоторезистора
light = analogRead( pinPhoto );
// если значение ниже порога, значит светодиод загорожен
if(light < maxLight && work){
// опускаем флаг, чтобы не считать, пока светодиод перекрыт
work = false;
// если первая итерация, то не считаем ее, чтобы начать отсчет времени
if(sum == -1){
// записываем время старта
lastMillis = millis();
sum = 0;
}else{
unsigned long currentMillis = millis();
// записываем в sum количество миллисекунд между оборотами
sum += (currentMillis - lastMillis);
numTurn++;
// считаем 20 раз, для большей точности
if(numTurn == count_zamer){
float sredSpeed = 0;
numTurn = 0;
// берем среднее и высчитываем количество оборотов для минуты
sredSpeed = 60000 / ((float)sum / (float)count_zamer); // оборотов в минуту
Serial.print("speed: ");
Serial.println(sredSpeed);
sum = -1;
// вывод данных на LCD дисплей
lcd.clear();
lcd.setCursor(0, 0); lcd.print("S");
lcd.setCursor(1, 0); lcd.print("P");
lcd.setCursor(2, 0); lcd.print("E");
lcd.setCursor(3, 0); lcd.print("E");
lcd.setCursor(4, 0); lcd.print("D");
lcd.setCursor(5, 0); lcd.print(":");
// преобразовываем числовое значение в строку
// и по одному символу выводим не дисплей
char string_turn[] = "";
sprintf(string_turn,"%d", (int)sredSpeed);
char *current = string_turn;
int count_numbers = 0;
while ( *current != '\0' )
{
lcd.setCursor(6+count_numbers, 0);
lcd.print(*current);
count_numbers++;
current++;
}
lcd.setCursor(count_numbers+7, 0); lcd.print("r");
lcd.setCursor(count_numbers+8, 0); lcd.print("/");
lcd.setCursor(count_numbers+9, 0); lcd.print("m");
lcd.setCursor(count_numbers+10, 0); lcd.print("i");
lcd.setCursor(count_numbers+11, 0); lcd.print("n");
}
lastMillis = currentMillis;
}
}
// если светодиод не загорожен
if(light >= maxLight){
work = true;
}
}
Настройка карбюратора автомобиля
Теперь несколько слов о настройке карбюратора автомобиля «ВАЗ» с использованием данного прибора, на примере «ВАЗ-2108».
Настройка карбюратора на холостой ход
Необходимо установить номинальную частоту вращения коленвала на холостом ходу при допустимом содержании СО в выхлопе не более 2%.
Действия такие. Подключаете тахометр «+13V» к положительной клемме аккумулятора, «GND» к массе (минус аккумулятора). Контакт «К» — к контакту катушки зажигания, соединенному с выходом коммутатора («К»). Пускаете двигатель и прогреваете его до номинальной температуры.
Очень медленно вращаете винт качества смеси в ту и другую сторону, пока не найдете положение, при котором показания прибора максимальны. Затем винтом количества устанавливаете показания прибора 900-950тV, и снова немного подстраиваете винт качества, чтобы эти показания были максимальными.
Теперь нужно дать двигателю поработать некоторое время (1-2 минуты). Затем, запомните показания прибора (допустим было 928mV), и очень медленно завинчивайте винт качества до тех пор, пока показания прибора не уменьшатся на 100mV (в нашем случае, до 828mV).
Дайте двигателю поработать около минуты, и винтом количества установите номинальную частоту вращения, согласно требованию для данной модели автомобиля (например, 850 об/мин для ВАЗ-2108). При такой регулировке содержание СО (если двигатель исправен) будет в пределах 1,5-2%.
Генератор сигналов на микросхеме таймера 555
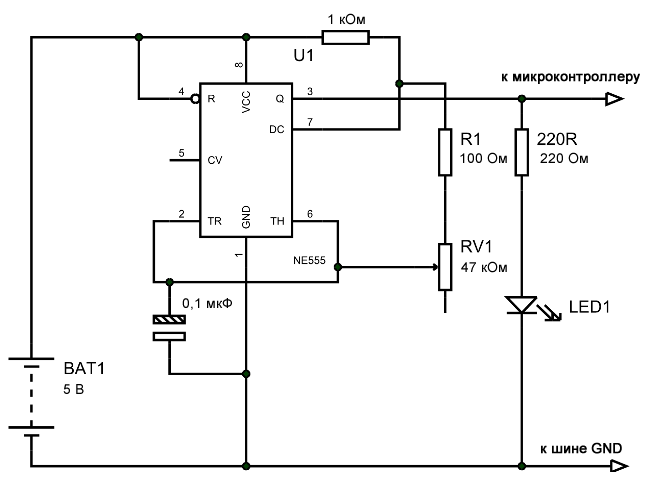 Генератор сигналов на микросхеме таймера 555. Схема электрическая принципиальная
Генератор сигналов на микросхеме таймера 555. Схема электрическая принципиальная
Прежде всего, мы поговорим о генераторе прямоугольного сигнала на микросхеме 555, или, я бы сказал, о нестабильном (астабильном, автоколебательном) мультивибраторе на 555. Эта схема необходима, потому что для проверки частотомера нам необходим сигнал, частота которого известна. Без этого сигнала мы не сможем рассказать о работе частотомера. Если у нас есть прямоугольный сигнал с известной частотой, мы можем использовать его для проверки частотомера на Arduino и для подстройки точности в случае любых отклонений. Макет генератора сигнала на микросхеме таймера 555 показан ниже.
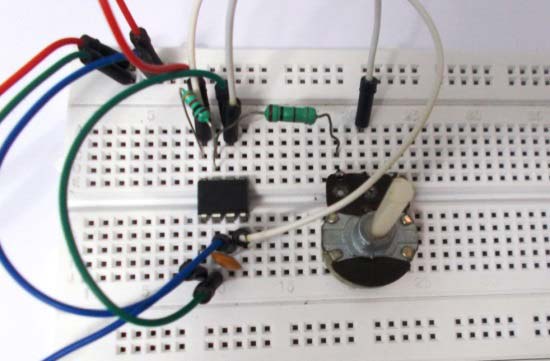 Макет генератора сигналов на микросхеме таймера 555
Макет генератора сигналов на микросхеме таймера 555
Ниже показана типовая схема таймера 555 в нестабильном режиме, из которой мы получили вышеприведенную схему генератора сигналов.
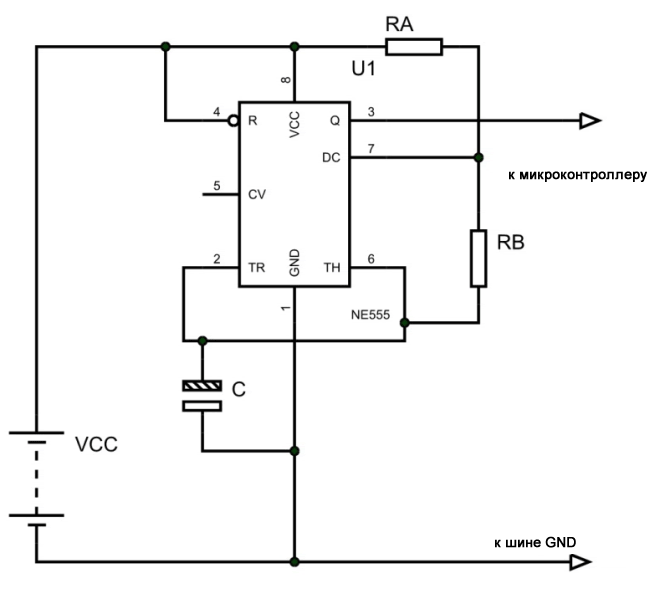 Типовая схема на таймере 555 в автоколебальном режиме
Типовая схема на таймере 555 в автоколебальном режиме
Частота выходного сигнала зависит от резисторов RA и RB и конденсатора C. Формула будет следующей:
\
Здесь RA и RB – значения сопротивлений, а C – значение емкости. Подставляя значения сопротивлений и емкости в приведенную выше формулу, мы получаем частоту выходного прямоугольного сигнала.
Можно увидеть, что RB на схеме выше заменен в нашей схеме генератора сигналов потенциометром; это сделано для того, чтобы для лучшего тестирования мы могли получить на выходе прямоугольный сигнал переменной частоты. Для простоты можно заменить этот потенциометр простым резистором.
Используем микроконтроллер
Чтобы сделать тахометр своими руками на базе микроконтроллера, потребуются следующие детали:
- Непосредственно микроплата, подойдет схема Arduino.
- Комплект резисторов.
- Для светодиодного варианта потребуется LED-элемент.
- Диоды (инфракрасный и фотоаналог).
- Монитор. Например, LCD-дисплей.
- Регистр сдвига типа 74HC595.
В рассмотренном далее способе применяется не щелевой, а оптический регулятор. Это позволит избежать проблем с толщиной ротора, количество лопастей не будет сказываться на показаниях, а также появится возможность считывать информацию об оборотах барабана.