Датчики линейных перемещений потенциометрические лтр
Содержание:
Потенциометр – популярный компонент датчика
Наиболее часто используемым компонентом для всех «датчиков положения», как правило, является потенциометр. Приоритет использования потенциометра очевиден, так как конструкция является недорогим и удобным для применения в датчиках положения.
Потенциометр имеет скользящий контакт, связанный механически с валом. Конструкция контактного движения допустима как угловая (вращательная), так и линейная (ползунковая).
Главное требование — вызвать изменение значения сопротивления между контактами ползуна и двумя концевыми соединениями.
Таким способом формируется электрический сигнал, имеющий пропорциональное соотношение между фактическим состоянием ползуна резистивной дорожки потенциометра и значением сопротивления потенциометра. Другими словами – значение сопротивления пропорционально положению.
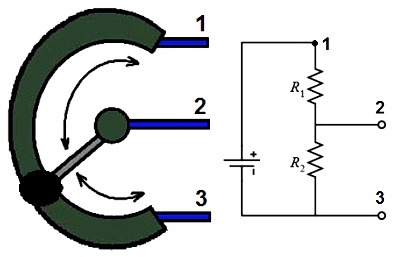
Структурная схема прибора по принципу потенциометра: 1 – ползунок потенциометра; 2 – кондуктивный или резистивный трек; 3, 7 – питание «плюс»; 4 – выходной сигнал; 5 – угловое перемещение вала; 6, 8 – питание «минус»; 9 – линейный выход
Потенциометры поставляются в широком диапазоне конструкций и размеров. Широко распространены круглые и длинные, плоские линейные потенциометры.
При использовании в качестве датчика положения, подвижный объект подключается непосредственно к вращающемуся валу или ползунку потенциометра.
Опорное напряжение постоянного тока подается через два внешних неподвижных соединения, образующих резистивный элемент. Сигнал выходного напряжения берётся от клеммы скользящего контакта, как показано ниже.
Такая конфигурация создаёт выходное напряжение (делитель напряжения), пропорциональное положению вала. Например, на резистивный элемент потенциометра подаётся напряжение 10 вольт.
Тогда на скользящем контакте максимальное выходное напряжение будет равно напряжению питания 10 вольт, а минимальное выходное напряжение, соответственно, 0 вольт.
Если ползунок потенциометра установить в центральной точке полного пути прохождения, на выходе, соответственно, получится половина питающего напряжения, то есть — 5 вольт.
Пример простой позиционной измерительной цепи:
1 – сенсор; 2 – питание «плюс»; 3, 4 – выходной усиленный сигнал; R1, R2, R3, R4 – электронные компоненты схемы усилителя; ОУ – операционный усилитель
Преимущества и недостатки датчиков-потенциометров
Резистивные датчики положения по типу потенциометра имеют массу преимуществ:
- низкая цена,
- экономичная технология,
- простота использования и т. д.,
Однако датчикам положения присущи также много недостатков:
- износ движущихся частей,
- невысокая степень точности,
- слабая повторяемость,
- ограниченная частотная характеристика.
Главным недостатком считается использование потенциометра в качестве позиционного датчика.
Диапазон перемещения ползунка в этом случае (следовательно, получение выходного сигнала) ограничивается физическим размером используемого потенциометра.
Например, однооборотный поворотный потенциометр обычно имеет фиксированное механическое вращение в диапазоне 0º — 240º, максимум — 330º.
Тем не менее, доступны к применению многооборотные потенциометры с диапазоном вплоть до 3600º (10×360º) механического вращения.
Большинство типов потенциометров используют углеродную пленку под формирование резистивной дорожки. Но такой тип часто проявляет дефект электрических шумов (к примеру, регулятор громкости радиосигнала). Механический ресурс таких резисторов ограничен.
Сенсоры на основе проволочных реостатов
Другой тип — проволочные реостаты, изготовленные по форме проводника с прямой проволокой, либо в образе катушки, намотанной спиралью. Однако проволочные реостаты обладают проблемой, связанной с переходом по сегментам проволоки.
Это сопровождается логарифмическим результатом по выходу, что приводит к искажению выходного сигнала. Также проволочные реостаты дают электрические помехи.
Для высокоточных малошумных применений в настоящее время доступны потенциометры на основе полимерного сопротивления.
Такие конструкции имеют гладкую электрическую линейную резиновую дорожку с низким коэффициентом трения.
Конструкция дорожки обеспечивает:
- низкий уровень шума,
- длительный срок службы,
- хорошее свойство дискретности.
Подобная технология доступна как для многооборотных, так и для однооборотных устройств. Типичное применение этого типа высокоточного датчика положения:
- джойстик компьютерных игр,
- рулевые колёса,
- промышленные и роботизированные разработки.
Конструктивное исполнение
В промышленности распространены проволочные потенциометрические датчики перемещения. Они обладают высокой точностью и стабильностью, имеют малые величины температурного и переходного сопротивлений и низкий уровень шумов. К недостаткам относятся: небольшая величина сопротивления, малая разрешающая способность, износ подвижных частей и ограниченность применения при работе на переменном токе.
Устройства состоят из трех основных элементов:
- Каркас. Изготовлен из теплопроводного изоляционного материала или металла с диэлектрическим покрытием, не меняющий геометрические размеры при нагревании. Форма может быть в виде кольца, изогнутой пластины, стержня.
- Изолированная обмотка. Выполняется с точной укладкой провода, от шага которой зависит разрешающая способность прибора.
- Подвижная щетка. В местах ее соприкосновения с обмоткой витки очищены от изоляции. Подвижный контакт в устройствах может перемещаться поступательно или вращательно. В последнем случае устройства могут быть одно- или многооборотного исполнения.
Материалы
Каркас изготавливается из диэлектрического материала: керамики, гетинакса, текстолита, пластмассы. Применяется металл с изоляционным покрытием. Его высокая теплопроводность дает возможность хорошо отводить тепло от провода датчика.
Металл обмотки обладает высоким удельным электрическим сопротивлением, стойкостью к коррозии, небольшим влиянием температуры, прочностью на истирание и разрыв. Этим требованиям соответствует манганин, константан, никельхромовые сплавы. Намотка также может быть ламельной или пленочной.
Скользящие контакты снижают надежность датчиков и усложняют конструкцию. Недостатки проволочных потенциометров:
- низкая надежность контактов;
- нестабильность переходного сопротивления между движком и обмоткой из-за окисления и электроэрозии провода;
- дребезг контактов.
Большой ресурс имеют токопроводящие пластмассы, имеющие также лучшую линейность характеристики. Датчики на их основе применяются там, где требуется высокая надежность, особенно – в авиации.
Контакт щетки изготавливается с добавкой благородных металлов, чтобы они были мягче материала обмотки.
Погрешности датчиков
На реальные характеристики датчиков влияют следующие погрешности:
- Зона нечувствительности. При переходе контакта с одного витка провода на другой происходит скачок напряжения, величина которого определяется по формуле: DU=Uпит./W, где W – число витков.
- Неравномерность статической характеристики, связанная с колебаниями диаметра провода по длине, его удельным сопротивлением и точностью намотки.
- Наличие люфта между движком контакта и втулкой, влияющего на точность показаний.
- Неравномерность нажима щетки, влияющая на величину сопротивления контакта. Обычно силу прижатия движка к обмотке применяют достаточно большую. Однако сделать это не всегда удается, поскольку усилие от чувствительных элементов (мембран, поплавков, биметаллических пластин) — небольшое.
- Влияние электрического сопротивления нагрузки Rн. Ее величину выбирают в 10…100 раз больше сопротивления датчика.
Схемы
Датчики потенциометрического типа имеют статическую характеристику — зависимость напряжения на выходе Uвых от перемещения контакта X. Связь между этими параметрами у ненагруженного потенциометра обычно линейная:
где L — длина датчика, k — чувствительность (k = Uпит/L).
В реальности потенциометрический датчик содержит нагрузочное сопротивление Rн в следующем звене системы автоматического управления, которое влияет на величину Uвых.
Низкая надежность датчиков, связанная с потерей контакта, обрывом обмотки или межвитковым замыканием, приводит к необходимости изменения схемы соединений.
Если знак сигнала на выходе не меняется, датчик называется однополярным. Он представляет собой простейшее устройство типа переменного резистора.
Схема потенциометрического датчика двухтактного типа применяется для автоматического регулирования, где на выходе изменяется знак сигнала в зависимости от того, какой он на входе. От этого зависит направление управляющего перемещения рабочего органа.
Напряжение может сниматься со щетки и с середины потенциометра. Применяются также другие схемы подключений. При питании постоянным током, когда подвижный контакт проходит через его среднюю точку, знак на выходе изменяется на противоположный. Если на обмотку подается напряжение переменного тока, изменяется фаза на 180 0 .
В автоматике используются нелинейные характеристики датчиков. Для этого изменяется диаметр проволоки вдоль намотки, шаг обмотки, применяются каркасы сложной формы, шунтируются участки потенциометров сопротивлениями.
Конструкции датчиков
Датчик линейного перемещения потенциометрический состоит из диэлектрического каркаса различной формы (пластины, цилиндра, кольца и др.), на который наматывается изолированный провод, присоединенный к зажимам и закрепленный хомутами на концах. По обмотке перемещается металлическая щетка. Для датчиков поворотного типа каркасы делаются кольцевой формы, продольного – прямолинейные. В местах контакта с движком изоляция на проводе отсутствует.
На зажимы подается напряжение питания. Выходной сигнал снимается между одним из концов провода и контактом щетки, хотя есть другие схемы подключений.
Каждый линейный потенциометрический датчик имеет статическую характеристику в виде зависимости величины выходного сигнала от перемещения контакта щетки.
Индуктивные датчики положения
Типичным позиционным датчиком, которому не страшен механический износ, является «линейный переменный дифференциальный трансформатор».
Это индуктивный датчик положения, который используется для измерения движения и работает по тому же принципу, что трансформатор переменного тока.
Точное устройство измерения линейного перемещения, выход которого пропорционален положению подвижного сердечника.
Линейный дифференциальный трансформатор (ЛДТ)
Конструкция ЛДТ содержит три катушки, намотанные на полом трубчатом наконечнике. Одна катушка образует первичную обмотку, две другие образуют идентичные вторичные обмотки, соединенные электрически последовательно, но смещённые на 180º по фазе относительно обеих сторон первичной обмотки.
Подвижный мягкий железный ферромагнитный сердечник (именуемый также «арматурой»), соединённый с измеряемым объектом, скользит или перемещается вверх и вниз внутри трубчатого тела ЛДТ.
Небольшой потенциал переменного напряжения «сигнал возбуждения» (2 – 20 вольт среднеквадратичное значение, 2 — 20 кГц) прикладывается к первичной обмотке. В результате наводится сигнал ЭДС в двух соседних вторичных обмотках трансформатора.
Арматура магнитного сердечника на основе мягкого железа изначально находится точно в центре трубки — в «нулевом положении» относительно обмоток.
Индуцированные ЭДС двух вторичных обмоток, в данном случае, обнуляют выход друг друга, так как не совпадают по фазе. Соответственно, выходное напряжение равно нулю.
По мере смещения сердечника в одну или другую сторону от нулевой позиции, индуцированное напряжение внутри одной из вторичных катушек будет увеличиваться по сравнению с другой катушкой. На выходе появится напряжение.
Применение потенциометров в датчиках давления
Параметры работы различных устройств удобно преобразовывать в электрические сигналы. Потенциометрический датчик давления жидкости или газа применяют в системах подачи топлива в машинах, газа в магистралях и т. п. Обычно это мембранные измерительные приборы.
Под действием перепада давления на обеих сторонах мембраны происходит ее перемещение. При этом также поворачивается ползун. Если давления Р и Ри равны между собой, движок переходит в исходное левое положение, при котором устанавливается начальное сопротивление прибора. Когда Ри уменьшается, мембрана перемещается вправо, а ползунок устанавливает щетку потенциометра в положение, соответствующее перепаду давления.
Чтобы снизить погрешность дискретного изменения сопротивления потенциометра, количество витков на нем делают не менее 100. Ее можно полностью устранить, если перемещать щетку вдоль оси калиброванной проволоки реохорда.
Принцип действия
Потенциометр преобразует линейные или угловые перемещения в соответствующие величины напряжения, тока или сопротивления. За счет этого можно работать со многими неэлектрическими величинами: давлением, уровнем, расходом и др.
Потенциометрические датчики, принцип действия которых заключается в измерении перемещения или места расположения положения, соединяются своими подвижными контактами переменного резистора с объектами. Это могут быть клапаны, антенны, режущие инструменты и многое другое. После подачи питания на датчик с него снимается сигнал положения движка потенциометра, как с делителя напряжения.
Базовый метод регистрации во всех моделях остается одним и тем же, но имеются конструктивные отличия. Сигнал может сниматься напрямую или с помощью электронной схемы после его обработки и нормализации
Важно, чтобы он соответствовал определенным стандартам
Устройство и работа
На выводы резистивного элемента подается напряжение, которое предполагается регулировать. Подвижный контакт является регулирующим элементом, который приводится в действие вращением ручки. От подвижного контакта снимается напряжение, которое может находиться в диапазоне от нуля до наибольшей величины, равной входному напряжению на потенциометр, и зависит от текущей позиции подвижного контакта.
Потенциометр действует по типу переменного резистора, однако выполняет функции делителя напряжения. Его резистивный компонент представляет собой два резистора, которые соединены последовательно. Положение скользящего контакта является определяющим в определении отношения величины сопротивления 1-го резистора ко 2-му.
Наиболее популярным стал переменный однооборотный резистор. Он широко применяется в радиотехнике в качестве регулятора громкости, и в других устройствах. При изготовлении потенциометров применяются разные материалы для изготовления резистора: металлическая пленка, токопроводящий пластик, проволока, металлокерамика, углерод.
Типы датчиков
Применение потенциометрического датчика зависит от типа:
- T/TS – высокоточный прибор (0,075%), работающий в диапазоне осевых перемещений 150 мм. Подходит для окружной скорости до 10 м/с. Конструкция – обеспечение перемещения стержня в двух направлениях по принципу делителя напряжения.
- TR/TRS – такой же, как предыдущий, но с возвратной пружиной. Перемещение достигает 100 мм. Выдерживает более высокие поперечные нагрузки на наконечнике.
- TE1 – модель, которая содержит электронную схему для нормализации сигналов с аналоговым выходом.
- TE1 с возвратной пружиной – модификация для решения более широкого круга задач. Датчик более устойчив при повышенных поперечных нагрузках.
- TEX – потенциометрический датчик с поворотной головкой и с отслеживанием линейных перемещений объектов на расстояние до 300 мм. Шарнирное соединение облегчает монтаж и обеспечивает длительный срок эксплуатации.
- TEX с приводной штангой с резьбой на конце. Дает возможность жестко фиксировать объект.
- TEX с возвратной пружиной не требует жесткого крепления объекта к штанге.
- TX2 с поворотной головкой или с крепежными хомутами. Применяются в тяжелых условиях эксплуатации. Уровень защиты составляет IP 67, точность — 0,05%.
Потенциометрические датчики
Потенциометрический датчик представляет собой переменный резистор, к которому приложено питающее напряжение, его входной величиной является линейное или угловое перемещение токосъемного контакта, а выходной величиной – напряжение, снимаемое с этого контакта, изменяющееся по величине при изменении его положения.
Потенциометрические датчики предназначены для преобразования линейных или угловых перемещений в электрический сигнал.
Электрическая схема потенциометрического датчика приведена на рис. 25
По способу выполнения сопротивления потенциометрические датчики делятся на
— проволочные с непрерывной намоткой;
— с резистивным слоем.
Проволочные потенциометрические датчики предназначены для более точных измерений. Как правило их конструкции представляют собой каркас из гетинакса, текстолита или керамики, на который в один слой, виток к витку намотана тонкая проволока, по зачищенной поверхности которой скользит токосъемник.
Диаметр проволоки определяет класс точности потенциометрического датчика (высокий-0,03-0,1 мм , низкий 0,1-0,4 мм). Материалы провода: манганин, фехраль, сплавы на основе благородных металлов. Токосъемник выполнен из более мягкого материала, чтобы исключить перетирание провода.
Преимущества потенциометрических датчиков:
-малые габариты и вес;
-высокая степень линейности статических характеристик;
-возможность работы на переменном и постоянном токе.
Недостатки потенциометрических датчиков:
-наличие скользящего контакта, который может стать причиной отказов из-за окисления контактной дорожки, перетирания витков или отгибания ползунка;
-искажение статической характеристики под влиянием нагрузки;
-сравнительно небольшой коэффициент преобразования;
-наличие зоны нечувствительности у проволочных потенциометрических датчиков.
Статическую характеристику нереверсивного потенциометрического датчика (См. рисунок 26) рассмотрим на примере потенциометрического датчика с непрерывной намоткой. К зажимам потенциометра прикладывается переменное или постоянное напряжение U. Входной величиной является перемещение X, выходной − напряжение Uвых. Для режима холостого хода статическая характеристика датчика линейна т.к. справедливо соотношение : Uвых=(U/Rп)r,
где Rп- сопротивление обмотки; r- сопротивление части обмотки.
Учитывая, что r/Rп=x/l, где l — общая длина намотки, получим Uвых=(U/l)x=Kx [В/м],
где К — коэффициент преобразования (передачи) датчика.
Очевидно, что такой датчик не будет реагировать на изменение знака входного сигнала (датчик нереверсивный). Существуют схемы чувствительные к изменению знака, например, схема на рис. 27. Статическая характеристика такого датчика имеет вид представленный на рисунке 28
Полученные идеальные характеристики могут существенно отличатся от реальных за счет наличия различного рода погрешностей:
1.Зона нечувствительности. Выходное напряжение меняется дискретно от витка к витку, т.е. возникает эта зона, когда при малой величине перемещения Uвых не меняется.
Величина скачка напряжения определяется по формуле: DU=U/W, где W- число витков.
Порог чувствительности определяется диаметром намоточного провода
2.Неравномерность статической характеристики из-за непостоянства диаметра провода, удельного сопротивления и шага намотки.
3.Погрешность от люфта, возникающего между осью вращения движка и направляющей втулкой (для уменьшения используют поджимные пружины).
4. Погрешность от трения.
При малых мощностях элемента приводящего в движение щетку потенциометрического датчика может возникать за счет трения зона застоя.
5.Погрешность от влияния нагрузки.
При активной нагрузке (рис. 29) изменяется статическая характеристика (рис.30). Т.е. Uвых=f(r) зависит от Rн. При Rн>>Rп можно показать, что Uвых=(U/Rп)r;
При Rн, сравнимом с R, зависимость нелинейна, и максимальная погрешность датчика будет при отклонении движка на (2/3))l. Обычно выбирают Rн/Rп=10…100. Величина ошибки при x=(2/3)l может быть определена из выражения : E=4/27η, где η=Rп/Rн — коэффициент нагрузки.
a — Эквивалентная схема потенциометрического датчика с нагрузкой, б — Влияние нагрузки на статическую характеристику потенциометрического датчика.