Arduino и bluetooth jdy-31
Содержание:
- 5Скетч «эквалайзера»
- Схема проекта
- Объяснение программы для Arduino
- 1 Схема подключения пьезоизлучателяк Arduino
- 3Скетч для считывания показаний электретного микрофона
- 1Электретный капсюльный микрофон CMA-4544PF-W
- 5Скетч «эквалайзера»
- New User Manuals
- New User Manuals
- 5Скетч «эквалайзера»
- 1 Виды кнопок
- Popular Search
- Примеры
- 3Скетч для считывания показаний электретного микрофона
- New Search Added
- 3Описание последовательного сигнала управления регулятором громкости M62429
- Датчик звука (микрофон) для Arduino
- 3Скетч для считывания показаний электретного микрофона
- Popular Search
- Управление устройствами с помощью хлопков
- 3Скетч для считывания показаний электретного микрофона
- 4Скетч для управления микросхемой M62429 с помощью Arduino
- New Search Added
- 1Электретный капсюльный микрофон CMA-4544PF-W
- Frequently Asked Questions
- Как работает управление голосом?
- 1Электретный капсюльный микрофон CMA-4544PF-W
5Скетч «эквалайзера»
Немного модифицируем скетч. Добавим светодиоды и пороги их срабатывания.
const int micPin = A0;
const int gPin = 12;
const int yPin = 11;
const int rPin = 10;
void setup() {
Serial.begin(9600);
pinMode(gPin, OUTPUT);
pinMode(yPin, OUTPUT);
pinMode(rPin, OUTPUT);
}
void loop() {
int mv = analogRead(micPin) * 5.0 / 1024.0 * 1000.0; // значения в милливольтах
Serial.println(mv); // выводим в порт
/* Пороги срабатывания светодиодов настраиваются
вами экспериментальным методом: */
if (mv }
Эквалайзер готов! Попробуйте поговорить в микрофон, и увидите, как загораются светодиоды, когда вы меняете громкость речи.
Полезный совет
Значения порогов, после которых загораются соответствующие светодиоды, зависят от чувствительности микрофона. На некоторых модулях чувствительность задаётся подстроечным резистором, на моём модуле его нет. Пороги получились 2100, 2125 и 2150 мВ. Вам для своего микрофона придётся определить их самим.
Схема проекта
Схема измерителя уровня звука на основе платы Arduino и микрофона представлена на следующем рисунке.
В схеме мы используем усилитель звуковых сигналов на основе микросхемы LM386 чтобы усиливать сигнал с выхода конденсаторного микрофона. С выхода усилителя мы подаем сигнал на аналоговый контакт платы Arduino.
Коэффициент усиления используемого нами операционного усилителя LM386 может составлять от 20 до 200 в зависимости от номинала конденсатора или резистора, подключенного к его контактам 1 и 8. Если их не использовать совсем, то коэффициент усиления будет составлять минимальную величину – 20. Мы в нашем проекте использовали максимальный коэффициент усиления данного усилителя, поэтому мы включили конденсатор емкостью 10 мкФ между контактами 1 и 8 – учтите, что эти контакты чувствительны к полярности, поэтому отрицательный вывод конденсатора должен быть подключен к контакту 8 усилителя. Вся схема усилителя запитывается от контакта 5V платы Arduino.
Конденсатор C2 используется для фильтрации шумов, поступающих с микрофона. Когда микрофон улавливает какие либо звуки, на его выходе появляется сигнал переменного тока. Но в составе этого сигнала переменного тока может присутствовать шум с некоторым постоянным уровнем (постоянная составляющая сигнала), этот шум и отфильтровывается с помощью данного конденсатора. Аналогично этому конденсатор C3 на выходе усилителя используется для фильтрации постоянного уровня шумов, которые могли появиться в процесс усиления сигнала (добавиться к нему в процессе усиления).
Внешний вид собранной конструкции проекта показан на следующем рисунке.
Объяснение программы для Arduino
Полный код программы приведен в конце статьи, здесь же мы кратко рассмотрим его основные фрагменты.
В программе мы будем считывать значения АЦП с контакта A0 и преобразовывать их в децибелы с помощью уравнения, которое мы получили в предыдущем пункте статьи. Это значение децибел, как мы уже говорили, не будет абсолютно точным, но оно будет достаточно близким к своему истинному значению.
Arduino
adc= analogRead(MIC); //Read the ADC value from amplifer
dB = (adc+83.2073) / 11.003; //Convert ADC value to dB using Regression values
|
1 |
adc=analogRead(MIC);//Read the ADC value from amplifer dB=(adc+83.2073)11.003;//Convert ADC value to dB using Regression values |
Для проверки правильности работы программы мы также добавили светодиод, подключенный к цифровому контакту 3 платы Arduino. Этот светодиод будет загораться на 1 секунду если плата Arduino будет обнаруживать звук громкостью более 60 дБ.
Arduino
if (dB>60)
{
digitalWrite(3, HIGH); // turn the LED on (HIGH is the voltage level)
delay(1000); // wait for a second
digitalWrite(3, LOW);
}
|
1 |
if(dB>60) { digitalWrite(3,HIGH);// turn the LED on (HIGH is the voltage level) delay(1000);// wait for a second digitalWrite(3,LOW); } |
1 Схема подключения пьезоизлучателяк Arduino
Пьезоизлучатель, или пьезоэлектрический излучатель, или «пьезопищалка» – это электроакустическое устройство воспроизведения звука, использующие обратный пьезоэлектрический эффект. Принцип действия его основан на том, что под действием электрического поля возникает механическое движение мембраны, которое и вызывает слышимые нами звуковые волны. Обычно такие излучатели звука устанавливают в бытовую электронную аппаратуру в качестве звуковых сигнализаторов, в корпуса настольных персональных компьютеров, в телефоны, в игрушки, в громкоговорители и много куда ещё.
Пьезоизлучатель имеет 2 вывода, причём полярность имеет значение. Поэтому чёрный вывод подключаем к земле (GND), а красный – к любому цифровому пину с функцией ШИМ (PWM). В данном примере положительный вывод излучателя подключён к выводу «D3».
Схема подключения пьезоизлучателя к Arduino и схема, собранная на макетной плате
3Скетч для считывания показаний электретного микрофона
Напишем программу для Arduino, которая будет считывать показания с микрофона и выводить их в последовательный порт в милливольтах.
const int micPin = A0; // задаём пин, куда подключён микрофон
void setup() {
Serial.begin(9600); // инициализация послед. порта
}
void loop() {
int mv = analogRead(micPin) * 5.0 / 1024.0 * 1000.0; // значения в милливольтах
Serial.println(mv); // выводим в порт
}
Для чего может понадобиться подключать микрофон к Arduino? Например, для измерения уровня шума; для управления роботом: поехать по хлопку или остановиться. Некоторые даже умудряются «обучить» Arduino определять разные звуки и таким образом создают более интеллектуальное управление: робот будет понимать команды «Стоп» и «Иди» (как, например, в статье «Распознавание голоса с помощью Arduino»).
1Электретный капсюльный микрофон CMA-4544PF-W
Электретный микрофон CMA-4544PF-W, который является основой модуля, реагирует на звуковые волны с частотами от 20 Гц до 20 кГц. Микрофон является всенаправленным, т.е. чувствителен к звуку, приходящему со всех направлений, с чувствительностью -44 дБ. Более подробно об устройстве и принципе действия электретных микрофонов можно почитать в статье «Устройство и принцип работы электретных микрофонов».
Электретный капсюльный микрофон CMA-4544PF-W и модуль с микрофоном
Мы воспользуемся готовым модулем, в котором присутствует микрофон, а также минимально необходимая обвязка. Приобрести такой модуль можно здесь.
5Скетч «эквалайзера»
Немного модифицируем скетч. Добавим светодиоды и пороги их срабатывания.
const int micPin = A0;
const int gPin = 12;
const int yPin = 11;
const int rPin = 10;
void setup() {
Serial.begin(9600);
pinMode(gPin, OUTPUT);
pinMode(yPin, OUTPUT);
pinMode(rPin, OUTPUT);
}
void loop() {
int mv = analogRead(micPin) * 5.0 / 1024.0 * 1000.0; // значения в милливольтах
Serial.println(mv); // выводим в порт
/* Пороги срабатывания светодиодов настраиваются
вами экспериментальным методом: */
if (mv }
Эквалайзер готов! Попробуйте поговорить в микрофон, и увидите, как загораются светодиоды, когда вы меняете громкость речи.
Полезный совет
Значения порогов, после которых загораются соответствующие светодиоды, зависят от чувствительности микрофона. На некоторых модулях чувствительность задаётся подстроечным резистором, на моём модуле его нет. Пороги получились 2100, 2125 и 2150 мВ. Вам для своего микрофона придётся определить их самим.
New User Manuals
- › Furuno Gp32 Manual
- › How To Configure Vpn On Mobile Phones
- › Nikon Coolpix User Guide
- › Suzuki Burgman 200 Repair Manual Soprettyore
- › What Is Bone Remodeling
- › Download 1998 Jeep Grand Cherokee Service Manual
- › Curtain Wall Design Guide Manual
- › Ez Fix Cellphone Repair Richland
- › Aston Martin Vanquish Service Repair Manual Pdf
- › Organizational Documents For Llc
- › Pioneer Electronics Repair Center
- › Hp Quicktest Professional User Guide
- › Au480 Service Manual
- › User Manual Guide For Samsung Galaxy Grand
- › Manually Uninstall Trend Officescan
- › Allen And Heath Gl2400 Service Manual
- › Kawasaki Kx450f Service Repair Manual
- › Oral B Triumph Professional Care Manual
- Browse All Products >>
New User Manuals
- › Furuno Gp32 Manual
- › How To Configure Vpn On Mobile Phones
- › Nikon Coolpix User Guide
- › Suzuki Burgman 200 Repair Manual Soprettyore
- › What Is Bone Remodeling
- › Download 1998 Jeep Grand Cherokee Service Manual
- › Curtain Wall Design Guide Manual
- › Ez Fix Cellphone Repair Richland
- › Aston Martin Vanquish Service Repair Manual Pdf
- › Organizational Documents For Llc
- › Pioneer Electronics Repair Center
- › Hp Quicktest Professional User Guide
- › Au480 Service Manual
- › User Manual Guide For Samsung Galaxy Grand
- › Manually Uninstall Trend Officescan
- › Allen And Heath Gl2400 Service Manual
- › Kawasaki Kx450f Service Repair Manual
- › Oral B Triumph Professional Care Manual
- Browse All Products >>
5Скетч «эквалайзера»
Немного модифицируем скетч. Добавим светодиоды и пороги их срабатывания.
const int micPin = A0;
const int gPin = 12;
const int yPin = 11;
const int rPin = 10;
void setup() {
Serial.begin(9600);
pinMode(gPin, OUTPUT);
pinMode(yPin, OUTPUT);
pinMode(rPin, OUTPUT);
}
void loop() {
int mv = analogRead(micPin) * 5.0 / 1024.0 * 1000.0; // значения в милливольтах
Serial.println(mv); // выводим в порт
/* Пороги срабатывания светодиодов настраиваются
вами экспериментальным методом: */
if (mv }
Эквалайзер готов! Попробуйте поговорить в микрофон, и увидите, как загораются светодиоды, когда вы меняете громкость речи.
Полезный совет
Значения порогов, после которых загораются соответствующие светодиоды, зависят от чувствительности микрофона. На некоторых модулях чувствительность задаётся подстроечным резистором, на моём модуле его нет. Пороги получились 2100, 2125 и 2150 мВ. Вам для своего микрофона придётся определить их самим.
1 Виды кнопок
Кнопки бывают разные, но все они выполняют одну функцию – физически соединяют (или, наоборот, разрывают) между собой проводники для обеспечения электрического контакта. В простейшем случае – это соединение двух проводников, есть кнопки, которые соединяют большее количество проводников.
Виды кнопок, их внешний вид и обозначение на электрической схеме
Некоторые кнопки после нажатия оставляют проводники соединёнными (фиксирующиеся кнопки), другие – сразу же после отпускания размыкают цепь (нефиксирующиеся кнопки).
Также кнопки делят на:
- нормально разомкнутые,
- нормально замкнутые.
Первые при нажатии замыкают цепь, вторые – размыкают.
Сейчас нашёл широкое применение тип кнопок, которые называют «тактовые кнопки». Тактовые – не от слова «такт», а от слова «тактильный», т.к. нажатие хорошо чувствуется пальцами. Но этот ошибочный термин устоялся, и теперь эти кнопки у нас повсеместно так называют. Это кнопки, которые при нажатии замыкают электрическую цепь, а при отпускании – размыкают, т.е. это нефиксирующиеся, нормально разомкнутые кнопки.
Popular Search
› About Code Signing Certificates Requirements
› Add Microsoft Form To Sharepoint
› Ajax Submit Form Data
› Add Learning Certificates Of Completion
› Access My Profile Information
› Acculturation Mental Health And Quality Of Life Among
› Accounting General Journal Entry Template Excel
› Associate Degree In Photography Online
› Abc Art Activities For Preschoolers
› Adobe Acrobat Pro 2021 Manual
› Alphabet Activities For Preschoolers Pinterest
› Alphabet Letter Crafts Preschoolers Will Love
› Alphabet Letter Crafts Preschool
› Admissions Costs For International Students
› A Thematic Analysis Of Instructional Design Models
› Applying Learning Theories And Instructional Design Models For
› Application Fees And Fee Waiver Request Instructions
› Application Fee Waiver Form Instructions
› Adult Learning Theory Instructional Design
› Application Procedures For Certificate Of Registration
› Are There Ways To Waive College Application Fees
› Associate Data Scientist At Coursera
› Alabama Certificate Of Good Standing Request
› Advantages And Disadvantages Of Differentiated Instruction
› Azure And Xamarin Forms Pdf Free Access
› Assignments For Class 5 Mathematics Pdf Download
› Avery Design Templates For Address Labels
› Assignments For Class 5 Computers Pdf Download
› An Untrusted Certificate Authority Detected
› Android Recyclerview Multiple Layout Sealed Class
Примеры
Рассмотрим тестовый пример, который отправляет строку Hello from #<счётчик>:
Отправка
#include <Gyver433.h>
Gyver433_TX<2> tx; // указали пин
void setup() {
}
char data[] = "Hello from #xx"; // строка для отправки
byte count = 0; // счётчик для отправки
void loop() {
// добавляем счётчик в строку
data = (count / 10) + '0';
data = (count % 10) + '0';
if (++count >= 100) count = 0;
tx.sendData(data);
delay(100);
}
Приём
#include <Gyver433.h>
Gyver433_RX<2, 20> rx; // указали пин и размер буфера
void setup() {
Serial.begin(9600);
attachInterrupt(0, isr, CHANGE); // прерывание пина радио по CHANGE
}
// спец. тикер вызывается в прерывании
void isr() {
rx.tickISR();
}
void loop() {
if (rx.gotData()) { // если успешно принято больше 0
Serial.write(rx.buffer, rx.size); // выводим
Serial.println();
}
}
Библиотека позволяет отправлять данные любого типа (массив, структура) любой длины, что охватывает все возможные сценарии работы с радио.
3Скетч для считывания показаний электретного микрофона
Напишем программу для Arduino, которая будет считывать показания с микрофона и выводить их в последовательный порт в милливольтах.
const int micPin = A0; // задаём пин, куда подключён микрофон
void setup() {
Serial.begin(9600); // инициализация послед. порта
}
void loop() {
int mv = analogRead(micPin) * 5.0 / 1024.0 * 1000.0; // значения в милливольтах
Serial.println(mv); // выводим в порт
}
Для чего может понадобиться подключать микрофон к Arduino? Например, для измерения уровня шума; для управления роботом: поехать по хлопку или остановиться. Некоторые даже умудряются «обучить» Arduino определять разные звуки и таким образом создают более интеллектуальное управление: робот будет понимать команды «Стоп» и «Иди» (как, например, в статье «Распознавание голоса с помощью Arduino»).
New Search Added
- › Learn Leadership With Online Courses And Lessons
- › Messenger Not Working On Iphone
- › How To Get A Boating License In Florida
- › How To Destroy Documents Without A Paper Shredder
- › Help With My Assignment
- › Healthy Bmi For Height
- › Matcha Green Tea Health Benefits
- › Class 10 Cbse Board Solved Papers
- › Health Literacy And Medication Adherence Among
- › How A Sedentary Lifestyle Affects Your Health
- › Harvard Extension School Course Catalog
- › The Health Benefits Of Matcha Tea
- › Matcha Green Tea Health Benefits
- › For Students Finishing College Faster
- › International Tefl Academy Sign In
- › Family Healthcare Associates Careers And Employment
- › Communication Network Word Templates Design Download Now
- › Circular Flow Chart Template Slide Presentation
- All Result Listings »
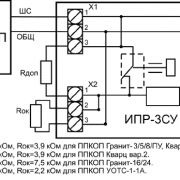
3Описание последовательного сигнала управления регулятором громкости M62429
Для управления микросхемой M62429 используется последовательный интерфейс с пакетной передачей данных. Длина одного пакета данных – 11 бит. Структура пакета приведена на рисунке.
Структура пакета управления микросхемой M62429
Первым битом передаётся номер канала, вторым – использовать ли независимое управление каналами или одновременное, далее 7 бит отведены под код громкости, и завершают пакет два бита, равные «1».
Важно знать параметры импульсов частоты и данных. Микросхема управляется меандром (скважность равна 2), минимальная длительность импульса tWHC (как и tWLC) – 1,6 мкс, а период tcr – 4 мкс
Остальные характеристики импульсов приводятся в техническом описании (datasheet), которое можно скачать по ссылкам ниже.
Временная диаграмма сигнала информационного обмена с микросхемой M62429
Датчик звука (микрофон) для Arduino
Состоит датчик из платы (смотри картинку ниже) на котором смонтированы порты подключения к Arduino Nano, усилитель звука, подстроечный резистор и электронный микрофон, чувствительный к звуку, приходящему во всех направлениях. Регулятором чувствительности (переменным резистором) можно настраивать чувствительность микрофона и выбирать от какого уровня шума будет срабатывать датчик.
Датчик звука Arduino для слежения за уровнем шума
Данная плата расширения для Arduino позволяет перевести звуковые колебания в цифровой сигнал. При колебании мембраны в микрофоне от звуковых волн, изменяется емкость его конденсатора, вследствие чего проявляется изменение напряжения на выходах датчика звука, соответствующее звуковому сигналу. Сенсор слева на картинке может отправлять цифровой и аналоговый сигнал.
3Скетч для считывания показаний электретного микрофона
Напишем программу для Arduino, которая будет считывать показания с микрофона и выводить их в последовательный порт в милливольтах.
const int micPin = A0; // задаём пин, куда подключён микрофон
void setup() {
Serial.begin(9600); // инициализация послед. порта
}
void loop() {
int mv = analogRead(micPin) * 5.0 / 1024.0 * 1000.0; // значения в милливольтах
Serial.println(mv); // выводим в порт
}
Для чего может понадобиться подключать микрофон к Arduino? Например, для измерения уровня шума; для управления роботом: поехать по хлопку или остановиться. Некоторые даже умудряются «обучить» Arduino определять разные звуки и таким образом создают более интеллектуальное управление: робот будет понимать команды «Стоп» и «Иди» (как, например, в статье «Распознавание голоса с помощью Arduino»).
Popular Search
› Acer Aspire 5 Manual
› Acer Aspire Laptop Manual
› Asus Motherboard User Manual
› Asus Desktops
› Apc Power Supply
› Aspire 5 Acer Laptop Manual
› Acer Cameras
› Apc Back Ups 750 Manual
› Aarp Landline Phones For Seniors
› Acer Monitor R221q Manual
› Acer Mobile Phones Price List
› Asus Personal Computer
› Apc Battery Backup Manual
› Acer Keyboard Kbcr21 Manual
› Apc Smart Ups 2000 Manual
› Acer Mobile Phones
› Apc Smart Ups Smt3000 Manual
› Asus Laptop User Manual Download
› Accessories
› Acer Keyboard Kb69211 User Manual
› Acer Aspire 1 User Manual
› Acer Chromebook R11 User Manual
› Accounting Manual Example
› Asus Bluetooth Keyboard Instructions
› Authorized Miele Repair Service
› Apc Manuals Free Download
› Authorized Whirlpool Repair Service Near Me
› Apc Back Ups 575 Manual
› Apc Xs 1300 Manual Pdf
› Acer Car Video System
Управление устройствами с помощью хлопков
В нашем следующем проекте мы будем использовать звуковой датчик в качестве «детектора хлопков», который включает устройства, питающиеся от сети переменного тока, хлопком в ладоши.
В данном проекте для управления питанием устройств используется одноканальный модуль реле, который будет коммутировать переменное напряжение сети 220 В.
Схема соединений
Схема соединений в этом проекте очень проста.
|
Предупреждение: |
Сначала необходимо подать питание на датчик и модуль реле. Подключите их выводы VCC к выводу 5V на Arduino, и выводы GND к выводу GND на Arduino.
Затем подключите выходной вывод (OUT) звукового датчика к цифровому выводу 7 на Arduino, а управляющий вывод (IN) на модуле реле к цифровому выводу 8 Arduino.
Вам также необходимо поместить модуль реле в линию питания устройства, которым вы хотите управлять. Вам придется разрезать один провод в кабеле питания и подключить один конец отрезанного провода (идущий от вилки) к выводу COM (общий) модуля реле, а другой к выводу NO (нормально разомкнутый).
Схема соединений показана на следующем рисунке.
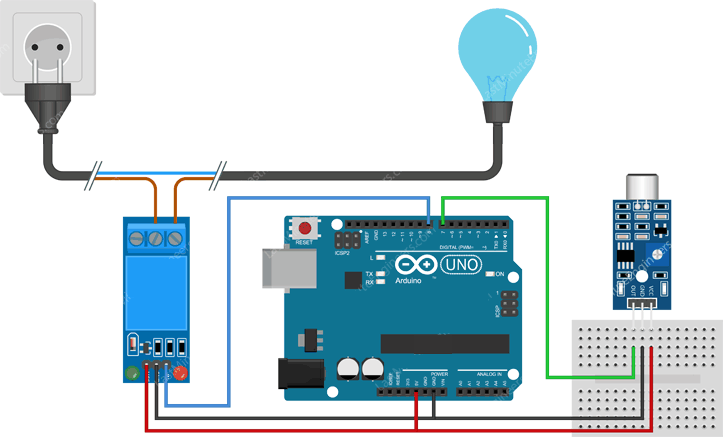 Рисунок 7 – Схема подключения датчика звука и модуля реле к плате Arduino
Рисунок 7 – Схема подключения датчика звука и модуля реле к плате Arduino
Код Arduino
Ниже приведен скетч для управления устройствами с помощью хлопков.
После того, как вы загрузили программу в Arduino, и всё включили, датчик должен включать или выключать управляемое устройство каждый раз, когда вы хлопаете.
Объяснение
Если вы сравните этот скетч с предыдущим, вы заметите много общего, кроме нескольких вещей.
В начале мы объявляем вывод Arduino, к которому подключен вывод управления реле (IN). Мы также определили новую переменную для хранения состояния реле.
В функции мы настраиваем вывод как выходной.
Теперь, когда мы обнаруживаем звук хлопка, вместо того, чтобы печатать сообщение в мониторе последовательного порта, мы просто переключаем состояние реле.
3Скетч для считывания показаний электретного микрофона
Напишем программу для Arduino, которая будет считывать показания с микрофона и выводить их в последовательный порт в милливольтах.
const int micPin = A0; // задаём пин, куда подключён микрофон
void setup() {
Serial.begin(9600); // инициализация послед. порта
}
void loop() {
int mv = analogRead(micPin) * 5.0 / 1024.0 * 1000.0; // значения в милливольтах
Serial.println(mv); // выводим в порт
}
Для чего может понадобиться подключать микрофон к Arduino? Например, для измерения уровня шума; для управления роботом: поехать по хлопку или остановиться. Некоторые даже умудряются «обучить» Arduino определять разные звуки и таким образом создают более интеллектуальное управление: робот будет понимать команды «Стоп» и «Иди» (как, например, в статье «Распознавание голоса с помощью Arduino»).
4Скетч для управления микросхемой M62429 с помощью Arduino
Зная всё это, напишем скетч, который будет изменять громкость регулятора от максимума до минимума со скоростью 1 децибел в секунду. Сердце программы – процедура setVolume() и два массива кодов громкости, которые составлены из двух таблиц кодов громкости в техническом описании (таблицы «Volume Code»).
Скетч управления регулятором громкости M62429 (разворачивается)
const int CLK = 4;
const int DATA = 2;
const int twhc = 2;
const int twlc = 2;
// Коды громкости аттенюатора 1.
// Значения кодов - из таблицы кодов громкости из технического описания.
int att1 = {
{1, 0, 1, 0, 1}, //-0db
{0, 0, 1, 0, 1}, //-4db
{1, 1, 0, 0, 1}, //-8db
{0, 1, 0, 0, 1}, //-12db
{1, 0, 0, 0, 1}, //-16db
{0, 0, 0, 0, 1}, //-20db
{1, 1, 1, 1, 0}, //-24db
{0, 1, 1, 1, 0}, //-28db
{1, 0, 1, 1, 0}, //-32db
{0, 0, 1, 1, 0}, //-36db
{1, 1, 0, 1, 0}, //-40db
{0, 1, 0, 1, 0}, //-44db
{1, 0, 0, 1, 0}, //-48db
{0, 0, 0, 1, 0}, //-52db
{1, 1, 1, 0, 0}, //-56db
{0, 1, 1, 0, 0}, //-60db
{1, 0, 1, 0, 0}, //-64db
{0, 0, 1, 0, 0}, //-68db
{1, 1, 0, 0, 0}, //-72db
{0, 1, 0, 0, 0}, //-76db
{1, 0, 0, 0, 0} //-80db
};
// Коды громкости аттенюатора 2
int att2 = {
{1, 1}, //-0db
{0, 1}, //-1db
{1, 0}, //-2db
{0 ,0} //-3db
};
void setup() {
pinMode(DATA, OUTPUT);
pinMode(CLK, OUTPUT);
digitalWrite(DATA, HIGH);
digitalWrite(CLK, LOW);
delay(1000);
}
void loop() {
// Ежесекундно уменьшаем громкость на 1 дБ,
// по достижении -83 дБ начинаем с начала:
for (int db=0; db>=-83; db-=1){
setVolume(0, true, db);
delay(1000);
}
delay(2000);
}
// Задаёт уровень громкости в заданном канале.
// channel – канал, 0 или 1;
// independent – управление одним каналом (true) или обоими сразу (false);
// decibels – ослабление громкости в децибелах, от 0 до -83.
void setVolume(int channel, bool independent, int decibels) {
// Определяем значения аттенюаторов:
int att1index = floor(abs(decibels) / 4);
int att2index = abs(decibels) % 4;
// Задаём в пакете канал:
digitalWrite(DATA, (bool)channel);
digitalWrite(CLK, HIGH);
digitalWrite(DATA, LOW);
digitalWrite(CLK, LOW);
// Задаём одновременное или независимое управление каналами:
digitalWrite(DATA, independent);
digitalWrite(CLK, HIGH);
digitalWrite(DATA, LOW);
digitalWrite(CLK, LOW);
// Задаём значение 1-го аттенюатора D2..D6:
for (int i=0; i<5; i++) {
digitalWrite(DATA, (bool)att1);
digitalWrite(CLK, HIGH);
digitalWrite(DATA, LOW);
digitalWrite(CLK, LOW);
}
// Задаём значение 2-го аттенюатора D7..D8:
for (int i=0; i<2; i++) {
digitalWrite(DATA, (bool)att2);
digitalWrite(CLK, HIGH);
digitalWrite(DATA, LOW);
digitalWrite(CLK, LOW);
}
// Два последних бита пакета – две единицы:
digitalWrite(DATA, HIGH);
digitalWrite(CLK, HIGH);
delayMicroseconds(twhc);
digitalWrite(DATA, LOW);
digitalWrite(CLK, LOW);
delayMicroseconds(twlc);
digitalWrite(DATA, HIGH);
digitalWrite(CLK, HIGH);
delayMicroseconds(twhc);
digitalWrite(CLK, LOW);
digitalWrite(DATA, LOW);
delayMicroseconds(twlc);
}
Замечу, что в децибелах задавать ослабление громкости не всегда удобно. Можно сделать процедуру, принимающую, допустим, уровень громкости. Типа такого: setVolumeInPercent(0, true, 35), где – второй канал, true говорит о независимом управлении каналами, а 35 – уровень громкости в процентах от максимального (или же наоборот – уровень ослабления аттенюатора).
Загрузим скетч в память Arduino и посмотрим на результат. Я подключил осциллограф к каналам CLOCK и DATA для демонстрации.
Информационный обмен Arduino с микросхемой M62429
Фиолетовый сигнал – CLOCK, зелёный – DATA.
Осциллограмма информационного обмена Arduino с микросхемой M62429
А вот как выглядит осциллограмма напряжения на выходе VOUT1 микросхемы M62429, отображённая на экране осциллографа DSO138.
Изменение напряжения на выходе микросхемы M62429
Скачать техническое описание на микросхему M62429 можно в конце статьи (перезалито).
New Search Added
- › Learn Leadership With Online Courses And Lessons
- › Messenger Not Working On Iphone
- › How To Get A Boating License In Florida
- › How To Destroy Documents Without A Paper Shredder
- › Help With My Assignment
- › Healthy Bmi For Height
- › Matcha Green Tea Health Benefits
- › Class 10 Cbse Board Solved Papers
- › Health Literacy And Medication Adherence Among
- › How A Sedentary Lifestyle Affects Your Health
- › Harvard Extension School Course Catalog
- › The Health Benefits Of Matcha Tea
- › Matcha Green Tea Health Benefits
- › For Students Finishing College Faster
- › International Tefl Academy Sign In
- › Family Healthcare Associates Careers And Employment
- › Communication Network Word Templates Design Download Now
- › Circular Flow Chart Template Slide Presentation
- All Result Listings »
1Электретный капсюльный микрофон CMA-4544PF-W
Электретный микрофон CMA-4544PF-W, который является основой модуля, реагирует на звуковые волны с частотами от 20 Гц до 20 кГц. Микрофон является всенаправленным, т.е. чувствителен к звуку, приходящему со всех направлений, с чувствительностью -44 дБ. Более подробно об устройстве и принципе действия электретных микрофонов можно почитать в статье «Устройство и принцип работы электретных микрофонов».
Электретный капсюльный микрофон CMA-4544PF-W и модуль с микрофоном
Мы воспользуемся готовым модулем, в котором присутствует микрофон, а также минимально необходимая обвязка. Приобрести такой модуль можно здесь.
Frequently Asked Questions
How does Arduino read analog voltage?
Arduino analog pins read a voltage that is expected to range from 0V to 5V. A standard way to turn a resistance change in a thermistor into a voltage change that the Arduino analog pin can read is to create a voltage divider circuit.
What is analog pin in Arduino?
Analog pins are the ADC (analog to digital converter) input pins. They are used for reading analog voltage (between 0-5V on arduino, by default).
What is the output voltage of Arduino Uno?
Arduino board has two power outputs: 5V Pin as a Power Output. 3.3V Pin as a Power Output. An Arduino (Uno/Nano) or Arduino compatible board. DC-DC step-up converter.
Как работает управление голосом?
Управление голосом с помощью смартфона
Сама схема достаточно проста, ее основой служит микроконтроллер Arduino, который и будет обрабатывать сигнал от сенсора, производя в зависимости от поступившей команды, посредством исполняющей части, необходимое действие. Выбор именно его – ориентированность и модульность. Он наиболее полно вписывается в понятие «умный дом», позволяя расширять свои возможности практически безграничным количеством внешних модулей, удобной системой программирования и интерфейсным взаимодействием с компьютером.
С основой разобрались, осталось выбрать принцип функционирования самого распознавания голоса, а соответственно и вид сенсора. Их несколько:
использовать связь с online – службами обработки голоса, наподобие Google или Yandex, с последующей реакцией контроллера на переданные результаты, причем в таком случае будет использоваться более «умное» устройство – посредник, компьютер или смартфон;Пример взаимодействия с сервисом Google
- распознавание голосовых фонем силами самого микроконтроллера;
- обработка звуковых сигналов дополнительным модулем, подключаемым к Arduino.
Понятно, что в первом случае наличие подключенного микрофона к самой плате контроллера не нужно. Достаточно будет или прямого присоединения интерфейсных проводов от компьютера, или использования дополнительного Bluetooth – модуля для обеспечения связи в случае смартфона. Последний вариант и будет рассмотрен.
Представленная схема голосового управления на базе Ардуино будет демонстративной, максимально быстрого изготовления. Но на ее основе уже можно создавать реальные системы обработки голосовых команд.
1Электретный капсюльный микрофон CMA-4544PF-W
Электретный микрофон CMA-4544PF-W, который является основой модуля, реагирует на звуковые волны с частотами от 20 Гц до 20 кГц. Микрофон является всенаправленным, т.е. чувствителен к звуку, приходящему со всех направлений, с чувствительностью -44 дБ. Более подробно об устройстве и принципе действия электретных микрофонов можно почитать в статье «Устройство и принцип работы электретных микрофонов».
Электретный капсюльный микрофон CMA-4544PF-W и модуль с микрофоном
Мы воспользуемся готовым модулем, в котором присутствует микрофон, а также минимально необходимая обвязка. Приобрести такой модуль можно здесь.